Què és el moviment?
És fàcil observar al nostre entorn objectes en moviment. Veure coses que es mouen ens resulta tan familiar, que ens sembla que no cal entendre ni explicar res dels moviments. Això no obstant, si ens preguntem què entenem per moviment topem amb certes dificultats. No n’hi ha prou a dir, per exemple, que un cos és en moviment perquè veiem que es mou. En alguns casos, el moviment dels cossos és imperceptible, de tan lent com pot arribar a ser. Per exemple, quan observem els estels en una nit serena o quan contemplem una glacera majestuosa no ens adonem que també estan dotats de moviment. Tot i això, els acurats mesuraments astronòmics i geològics ens diuen que tant els estels com les glaceres es mouen. Ara bé, si aquest moviment no es veu, aleshores, en què ens podem basar per a assegurar que es mouen? A més, hi ha casos que poden presentar situacions curioses com s’esdevé, per exemple, quan, asseguts en el compartiment d’un tren aturat en una estació, mirem per la finestra i tenim una sensació estranya, perquè ens adonem que alguna cosa es mou, però no sabem ben bé si som nosaltres o és el tren de la via del costat.
El sistema de referència
Per a poder decidir si un objecte aparentment quiet es mou, ens calen uns punts o objectes als quals referir-nos i, a més, fer les observacions tenint-los en compte. En altres paraules, el moviment d’un cos sempre és un moviment relatiu a alguna altra cosa. Els científics anomenen aquesta "altra cosa" un sistema de referència.
En el cas més genèric, un sistema de referència és constituït per un tern de coordenades ortogonals (en angle recte), amb un origen comú que considerem fix. És un concepte una mica complicat d’imaginar, però podem pensar en el punt d’unió de les tres arestes d’un cub. Quan la posició d’un cos varia respecte del sistema de referència que hem elegit, diem que el cos és en moviment. Aquesta definició ens permet avançar significativament en la descripció i l’explicació subsegüent de la naturalesa del moviment. Per començar, podem respondre a les preguntes plantejades abans. Així, una glacera es mou perquè es desplaça al llarg de la vall sobre la qual és situada, vall que actua com a sistema de referència. I el tren que es mou és el que es desplaça respecte de l’estació, la qual es pren com a sistema de referència en aquest cas.
La velocitat
Suposem que comparem el moviment de dos cossos que es mouen en una direcció i en el mateix sentit, però de tal manera que constatem que un d’ells s’allunya d’un punt de referència més de pressa que l’altre. En aquest cas diem que un dels dos va a una velocitat superior respecte de l’altre, perquè en el mateix interval de temps recorre un espai més gran. També diem el mateix d’un cotxe que recorre el mateix espai que un altre en menys temps. En tots dos casos, la velocitat és una magnitud directament proporcional a l’espai recorregut i inversament proporcional al temps emprat. Podem expressar així aquesta relació:
o també, anomenant la velocitat v, l’espai s i el temps t:
Si mesurem la posició en metres i el temps en segons, expressarem la velocitat en metres per segon o, com se sol escriure, metres/segon o m/s.
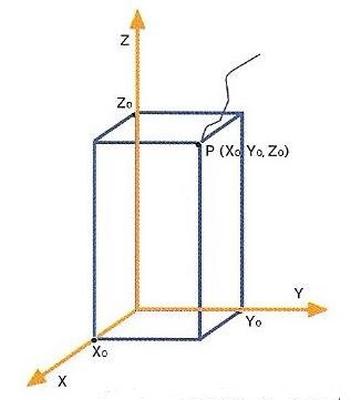
La localització d'un punt en moviment P exigeix la disposició d'un sistema de referència constituït pels eixos cartesians x, y, z. disposats ortogonalment (en angle recte). Les tres coordenades x0, y0, z0 respecte dels eixos fixos faciliten el seguiment del desplaçament del punt P.
ECSA
Suposem que volem mesurar la velocitat d’un cotxe. Un dels procediments seguits normalment consisteix a col·locar dos senyals (mecànics o òptics o usant un sistema per radar) a una distància coneguda i mesurar el temps que el cotxe necessita per a anar de l’un a l’altre. Podem imaginar-nos, per exemple, que els dos senyals són les casetes de peatge d’entrada i sortida d’una autopista. Coneixent la distància i el temps transcorregut, en calcular la relació obtindrem una velocitat anomenada velocitat mitjana, que és el valor constant que el conductor hauria mantingut durant tot el viatge per tal d’esmerçar-hi un temps determinat prèviament. Però sabem prou bé que, en general, la velocitat d’un cos no és constant. El moviment dels objectes que ens són més familiars, com els mitjans de transport, es produeix partint del repòs i amb un augment progressiu de la velocitat fins a assolir un valor màxim, amb variacions successives segons la fluïdesa del trànsit i les parades freqüents als semàfors o a les estacions. Si continuem considerant encara l’exemple del cotxe, pot passar que la velocitat mitjana sigui inferior als límits de velocitat establerts per la llei tot i que, en alguns trams del recorregut, el conductor hagi pogut superat aquests límits per tal de recuperar el temps perdut durant les parades o els alentiments. Per tal de calcular la velocitat de manera que s’obtinguin els valors més exactes de la seva variació amb el temps, hem de fer mesuraments en intervals d’espai i temps cada cop més petits. Per exemple, podem disposar els dos senyals a una distància prou curta entre ells, tan sols d’uns pocs centímetres (o fins i tot molt menys en el cas de fer servir senyals òptics o radars), per assegurar-nos que la velocitat correspongui efectivament al valor assolit pel cotxe en aquell breu espai. També en aquest cas la velocitat es defineix com la relació entre l’espai recorregut i el temps emprat, però per fer palès que es tracta d’intervals petits, que en principi poden reduir-se cada cop més, els indicarem amb el símbol ∆ (delta), que representa la diferència entre el valor final i l’inicial d’una mateixa magnitud. Així, doncs, escriurem:

A mesura que anem obtenint avaluacions d’intervals de temps cada cop més petits d’un mateix objecte en moviment, es va reduint també l’interval d’espai corresponent i la velocitat s’acosta cada vegada més al valor instantani. Per aquesta raó, anomenem velocitat instantània la relació entre ∆s i ∆t calculada per a intervals cada vegada més petits de ∆t.
L'acceleració
Entre les característiques tècniques presentades per la publicitat per a distingir les prestacions dels diversos models de cotxes no hi acostuma a faltar mai la relativa al temps que empra el vehicle per a passar del repòs a una determinada velocitat màxima, per exemple, quant triga a agafar els 100 km/h partint de sortida parada. En la llengua comuna es diu que el cotxe que tarda menys temps té més represa i que té un motor més àgil i potent. Podem traduir aquestes expressions al llenguatge de la física presentant una altra magnitud: l’acceleració. Per il·lustrar-la reprendrem el procediment que hem seguit a propòsit de la velocitat.
En la valoració de la capacitat d’acceleració (o represa) d’un cotxe s’ha de calcular la rapidesa amb què es dóna la variació de velocitat en l’interval de temps considerat. Procedint com en el cas de la velocitat instantània, indiquem amb ∆v la diferència entre la velocitat final i la velocitat inicial. Per tant, l’acceleració és definida per la relació:

Com que la velocitat es mesura en m/s, la diferència de velocitat també tindrà la mateixa unitat de mesura i, consegüentment, l’acceleració es mesurarà en m/s2 (metres per segon cada segon); així, la fórmula indica quants metres per segon varia la velocitat a cada segon transcorregut.
Quan pensem en un automòbil que accelera ens ve al cap un cotxe que es desplaça seguint un recorregut rectilini. Tot el que hem dit fins ara es refereix als desplaçaments en línia recta. Però igualment podem preguntar-nos si és possible definir l’acceleració d’un cotxe en un revolt, és a dir, quan no es desplaça en línia recta. La resposta, evidentment, és que sí, però els càlculs són una mica més complicats. La dificultat del problema rau en el fet que la velocitat és una magnitud vectorial, per a la qual no n’hi ha prou d’indicar un valor numèric, sinó que cal assenyalar-ne també la direcció i el sentit (vegeu "Escalars i vectors"). Així mateix, l’acceleració és una magnitud vectorial, ja que no mesura solament les variacions de velocitat, sinó que també expressa la variació de direcció.
Escalars i vectors
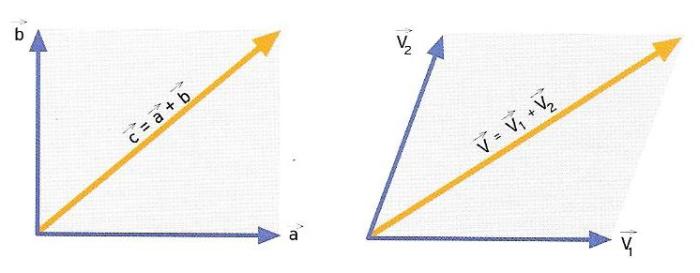
A l'esquerra: La suma de dos vectors ortogonals (en angle recte) a i b té com a resultant la hipotenusa d'un triangle rectangle c, la longitud de la qual es calcula aplicant el teorema de Pitàgores (c2=a2+b2). A la dreta: Suma de vectors segons la "regla del paral·lelogram" (vegeu el text), on la resultant v es la diagonal del paral·lelogram construït amb tots dos vectors.
ECSA
Si volem mesurar l’interval de temps que separa dos esdeveniments només ens cal recórrer a un rellotge i expressar el resultat amb una xifra i la unitat de mesura adequada com, per exemple, dues hores o dos dies. Però hi ha altres magnituds físiques que no podem representar limitant-nos només a la dada numèrica. Això és especialment cert pel que fa a magnituds com la velocitat, les acceleracions, els desplaçaments i les forces, de les quals tractem ara. A més del valor numèric, aquestes magnituds es caracteritzen per la direcció, el sentit i el punt d’aplicació.
Les magnituds per a les quals només cal indicar el valor numèric —dit també mòdul— s’anomenen escalars. Aquelles altres per a les quals cal especificar també la direcció i el sentit s’anomenen magnituds vectorials o vectors. Els vectors es representen per segments orientats amb una fletxa que n’indica el sentit, mentre que la direcció és la de la línia en què es traça el segment, la longitud del qual és una mesura, en escala, del mòdul. Per a les magnituds escalars continuen valent les propietats de la suma i de la diferència aritmètica entre nombres, però en el cas de magnituds vectorials no és tan senzill. Imagineu-vos que sortiu per anar a fer la compra a més d’una botiga. Primer aneu al mercat, després a la granja, després al forn, i finalment torneu a casa. Si sumeu els diferents intervals de temps de tot el recorregut, obtindreu el temps global que ha passat des que heu sortit de casa fins que hi heu tornat. Es tracta d’una simple suma aritmètica. Però si sumeu les distàncies que separen els diferents punts on us heu aturat, observareu un fet curiós, atès que la suma de la distància casa-mercat més la distància mercat-granja més la distància granja-forn més la distància forn-casa dóna la distància casa-casa, és a dir, zero. En efecte, en tornar carregats a casa amb les bosses de la compra, us trobeu al mateix punt de partida. És cert que heu caminat i que els diferents trajectes us han exigit una despesa energètica, però paradoxalment la distància final és zero. Per adonar-nos d’aquest fet hem d’entendre que per a la suma de vectors no val la regla més simple de la suma aritmètica, sinó que hem de recórrer a una composició gràfica coneguda com a "regla del paral·lelogram". Per obtenir el vector suma, o resultant, es construeix un paral·lelogram i es fa correspondre a cada vector l’altre vector que s’hi ha traslladat paral·lelament. La diagonal que es pot traçar des del punt d’intersecció dels vectors és la resultant, el mòdul de la qual es pot mesurar gràficament, en escala, o bé es pot calcular mitjançant els teoremes que permeten resoldre els costats d’un triangle. En alguns casos, el mòdul de la resultant es pot obtenir de manera molt simple.
Quan els vectors tenen la mateixa direcció, els mòduls se sumen aritmèticament si els sentits coincideixen, i es resten en cas contrari. En el cas de dos vectors que siguin ortogonals entre ells, el mòdul de la resultant es calcula amb el teorema de Pitàgores. També pot passar que en sumar diversos vectors, aplicant repetidament la regla del paral·lelogram, el mòdul de la resultant sigui zero, com en l’exemple exposat més amunt.
Classificació dels moviments

Quadre 11.1 Classificació d'alguns moviments simples.
ECSA
L’anhel dels científics, com en general de tots nosaltres quan reflexionem de manera rigorosa, és aconseguir entendre la diversitat i el caos aparent dels fenòmens observables mitjançant l’ús d’una clau de lectura que permeti ordenar-los i simplificar-los. En el cas del moviment podem estudiar situacions molt diferents, des de la trajectòria descrita per una mosca en una habitació fins a la d’una fulla que cau i voleia empesa pel vent, o potser altres de més simples i regulars com la rotació de les busques d’un rellotge. Malgrat aquesta aparença de complexitat, podem classificar els moviments més senzills en funció de tres característiques principals: la trajectòria, la velocitat i l’acceleració.
En els exemples del quadre 11.1 es passa del moviment més simple a d’altres cada cop més complicats. En realitat, no és gens fàcil observar aquests moviments en la natura, en el medi construït on vivim o en el laboratori, perquè les seves característiques es defineixen de manera rigorosament abstracta des del punt de vista matemàtic. No ens ha de sorprendre aquest contrast entre la teoria i la pràctica. És usual en ciència. De fet, els científics procedeixen construint models expressats sovint en llenguatge matemàtic. Un model sempre és una representació de la realitat, n’és una simplificació, però no és pas la realitat, de la mateixa manera que un mapa geogràfic representa un territori, però no és pas el territori. Ara bé, tot i ser una representació de la realitat, els models ens permeten conèixer-la cada vegada més bé mitjançant un procés d’aproximacions successives del mateix model. Els casos simples de moviment que hem classificat al quadre també són models. Vegem-ne alguns exemples per aclarir-ne el significat.
Si volem reproduir un moviment rectilini uniforme ens hem d’assegurar que es compleixin amb la màxima precisió dues condicions: la trajectòria ha d’establir-se al llarg d’una línia recta i la velocitat ha de ser constant. Un cas real que s’aproxima a aquesta situació ideal és el d’un tren que recorre un tram recte i pla i que manté sempre la mateixa velocitat. Amb un tren de joguina alimentat amb corrent elèctric podem simular amb força aproximació aquest exemple, construint un tram només amb vies rectes. Si construïm un traçat circular, llavors podem simular amb la mateixa aproximació la situació del moviment circular uniforme.
Ja hem tingut ocasió de parlar d’un moviment rectilini uniformement accelerat (vegeu "La gravitació universal"), que es correspon amb el de la caiguda dels cossos, en veure l’efecte que la força pes generada per la Terra exerceix sobre els objectes situats a prop seu. Per a estudiar experimentalment aquest tipus de moviment, que té lloc amb una acceleració de 9,8 m/s2, hem de mesurar intervals de temps molt breus, d’unes dècimes de segon o encara menys. En els temps de Galileu, que va ser el primer a estudiar de manera rigorosa aquest tipus de moviment, era difícil fer aquests mesuraments. Per evitar aquesta dificultat, Galileu es va limitar a estudiar, en lloc del moviment de caiguda lliure, el d’una petita esfera que rodolava per un pla inclinat. En aquest cas, l’acceleració depèn de la inclinació del pla i pot fer-se molt més petita que l’acceleració g de la gravetat reduint-ne oportunament el pendent, de manera que es puguin efectuar els mesuraments de temps fins i tot amb instruments rudimentaris com els rellotges d’aigua emprats en aquella època.
Avui, en canvi, podem estudiar directament la caiguda lliure utilitzant la fotografia estroboscòpica (imatge seriada del moviment d’un objecte obtinguda amb llum intermitent), que permet aconseguir representacions amb què mesurar l’acceleració g. Però les trajectòries dels moviments que observem comunament solen ser més complexes que les considerades al quadre. En el joc del futbol, per exemple, quan xutem la pilota cap amunt i endavant, veiem que la trajectòria que descriu no és gens rectilínia. En general, com ja hem vist en parlar de la gravitació, la trajectòria definida en aquests casos és una paràbola, que s’obté de la combinació de dos moviments més simples, el rectilini uniforme (en sentit horitzontal) i el rectilini uniformement accelerat (en sentit vertical).
L'explicació del moviment
Després de les nombroses operacions fetes amb la finalitat de descriure i classificar els fenòmens de la natura, la tasca del científic encara no s’ha acabat ni de bon tros. En efecte, l’estudiós té el propòsit d’explicar els fenòmens identificant-ne les causes i construint una teoria que permeti fer-ne previsions verificables. Això, naturalment, és vàlid també en el cas dels moviments.
Les forces entren en joc
En el llenguatge actual, els científics parlen d’interacció entre els cossos per indicar que els objectes que observem, des dels cossos celestes fins a qualsevol objecte de la vida quotidiana, exerceixen els uns sobre els altres unes accions que anomenem forces. A l’existència de les forces d’interacció s’atribueix una àmplia gamma de fenòmens observables a la natura, sobretot els relacionats amb el moviment, com en el cas concret de la força de gravitació que regula el moviment dels cossos celestes.
En general, quan una força actua sobre un cos sense que la contraresti una força contrària, es produeix una variació de velocitat i, per tant, direm que per efecte de la força aplicada el cos pateix una acceleració.
En parlar de la força pes (vegeu "La gravitació universal"), hem exposat que existeix una relació de proporcionalitat directa entre la força F i l’acceleració de la gravetat g, expressada amb la fórmula F = m g, essent m la massa del cos. Aquesta relació de proporcionalitat entre la força aplicada i l’acceleració causada també és vàlida en el cas genèric d’una força qualsevol, i el factor de proporcionalitat continua essent la massa del cos. Podem escriure la fórmula:
F = m a
Si volem mostrar el fet que per a un mateix cos la relació entre la força (la causa) i l’acceleració (l’efecte) és constant, la fórmula queda transformada en:
F/a = m
En efecte, experimentalment s’observa que per a un cos la relació entre força i acceleració és constant:
Aquesta relació fixa rep el nom de massa del cos. La massa correspon a allò que intuïtivament considerem com la quantitat de matèria continguda en un cos (vegeu encara "La gravitació universal"). Així, obtenim una proporcionalitat directa de la força respecte de la massa i l’acceleració, que podem expressar d’aquesta manera: força = massa3acceleració o, en símbols, F = m a, en què la força F indica el vector (vegeu "Escalars i vectors") resultant de totes les forces que actuen sobre el cos de massa m. Com que la massa es mesura en kg i l’acceleració en m/s2, la força es mesurarà en kg per m/s2. Aquest producte s’anomena newton, en honor al gran físic Isaac Newton, i es diu que sobre un cos de massa igual a 1 kg actua la força d’1 newton quan l’acceleració produïda és d’1 m/s2.
Les lleis de la dinàmica
La relació de proporcionalitat entre força, massa i acceleració, enunciada per Newton, es coneix com a segona llei (o llei fonamental) de la dinàmica. Aquesta llei permet també explicar matemàticament la primera llei de la dinàmica, descoberta amb anterioritat i formulada per Leonardo da Vinci, la qual estableix que quan un cos no rep cap força, o sigui quan el resultat de les forces que hi actuen és nul, el cos tendeix a quedar-se en repòs si ja està en repòs, o bé, si està en moviment rectilini uniforme, a conservar-lo.
Aquesta llei, com ja s’ha dit verificada experimentalment, es pot interpretar a partir de la segona llei, segons la qual F = m a. En efecte, si F (força resultant o suma de les forces) és sempre igual a zero, s’obté que 0 = m a, o sigui, a = 0/m = 0 (perquè, com sabem, una fracció amb numerador zero és igual a zero). I acceleració igual a zero significa que la velocitat no canvia, de manera que si un cos està quiet continua quiet i si està en moviment continua movent-se uniformement. A més, el fet que el moviment sigui rectilini s’explica, amb força aproximació, a partir del que hem dit a propòsit de l’acceleració. Si l’acceleració mesura la variació tant de la velocitat com de la direcció, el fet que l’acceleració sigui nul·la implica que no hi ha hagut tampoc variació de la direcció de la trajectòria.
La primera llei de la dinàmica també rep el nom de principi d’inèrcia, perquè inèrcia és precisament el terme que s’empra per a designar la tendència dels cossos a mantenir-se en l’estat de moviment o de repòs en què es troben. També és un terme que fem servir en la llengua comuna. A propòsit d’un cos que està quiet, diem que és inert, de la mateixa manera que si viatgem en autobús i una frenada sobtada ens tira cap endavant diem que ens hem vist desplaçats per la força de la inèrcia, que fa que el cos tendeixi a continuar en l’estat de moviment anterior.
L’ús del concepte de força ens permet explicar, així mateix, en quines condicions es verifica el moviment rectilini uniformement accelerat. Aquest moviment es produeix quan una o més forces, la resultant de les quals és constant i diferent de zero, actuen sobre un cos. Un exemple clàssic és el de la caiguda dels cossos sota l’acció única de la força de la gravetat, en absència suposada de fregament (vegeu-ne "El fregament" ). Quan un cos cau, la força pes és pràcticament constant i també ho és l’acceleració, coneguda com a acceleració de la gravetat; per tant, el cos s’acosta al terra amb un moviment uniformement accelerat.
Però si el cos cau en un ambient amb atmosfera, caldrà tenir en compte el fregament. En el cas de la caiguda d’un objecte penjat d’un paracaigudes o bé d’una gota d’aigua que s’escola per una aixeta podem constatar que després d’una primera fase d’acceleració, en la qual la força pes preval sobre la de fregament, s’arriba a una situació en què les dues forces s’equilibren i l’objecte continua caient amb un moviment uniforme rectilini mantenint la velocitat que portava en el moment d’assolir l’equilibri.
A més de les dues lleis de la dinàmica que acabem d’esmentar, n’existeix una altra que justifica que al començament de l’apartat anterior hàgim parlat no d’acció sinó d’interacció entre els cossos.
Encara que ens sembli que molts cossos pateixen passivament les forces que actuen sobre ells, la ciència física demostra que en realitat entre els cossos sempre es donen interaccions, és a dir, accions recíproques. Així, el primer cos actua sobre el segon i aquest, al seu torn, actua sobre el primer. Quan empenyem un objecte per una superfície horitzontal, per exemple un llibre damunt una taula, ens sembla que l’única força que intervé és la que apliquem amb la mà per aconseguir el desplaçament del llibre. Però en realitat també el llibre ens empeny la mà. Això ho podem notar per la pressió que experimentem, que pot deformar lleugerament la superfície de la mà. Si intercalem una molla entre la mà i el llibre, segurament ho veurem millor, ja que la molla s’arronsa i exerceix la mateixa força cap a totes dues bandes. Una situació ideal per a experimentar aquest efecte és la viscuda per molts astronautes en sortir d’una nau en òrbita al voltant de la Terra. Quan empenyien un cos endavant, ells eren empesos endarrere. Aquest fet es coneix com a llei d’acció i reacció o com a tercera llei de la dinàmica.
Les forces fonamentals
En la llengua comuna distingim les forces amb moltes especificacions diferents: forces de pressió, força del vent, força de xoc, força muscular, força elàstica o força magnètica, entre moltes altres. En realitat, els físics han determinat que solament algunes d’aquestes nombroses forces que observem en la natura es poden considerar fonamentals, en el sentit d’elementals i no basades ulteriorment en altres forces més simples. Totes les forces de la natura fins ara conegudes es poden reduir a una de les quatre forces o interaccions elementals, que són, per ordre d’intensitat creixent: la força gravitatòria, la feble, l’electromagnètica i la forta.
Hem parlat ja una mica d’aquestes interaccions i del coneixement científic actual (vegeu "Matèria i energia"), però podem afegir que, mentre que les interaccions forta i feble són de curt abast, és a dir, les partícules sobre les quals actuen han de trobar-se molt pròximes per a sentir-ne els efectes, les interaccions electromagnètica i gravitatòria són de llarg abast, ja que els seus efectes són perceptibles a llargues distàncies. De manera que, a l’escala macroscòpica, són aquestes dues forces les que ens resulten més familiars, encara que algunes vegades es presentin emmascarades. Per exemple, la força que notem quan agafem un objecte, que si és prou sòlid no podrem deformar per molt que el premem amb les mans, la descrivim correntment com una força de contacte. Però això és una descripció macroscòpica, és a dir, a l’engròs i sense anar al detall. El que passa en l’àmbit microscòpic és que es produeixen forces de repulsió entre les capes orbitals electròniques (no oblidem que les càrregues elèctriques del mateix signe es repel·len). Per tant, el que quotidianament descrivim com una força de contacte —i el mateix passa amb les forces de fregament— té un origen electromagnètic. I també tenen origen electromagnètic les forces que donen lloc a l’enllaç químic o les forces elàstiques que exhibeixen determinats cossos quan són deformats.
La intensitat de la força gravitatòria és molt menor, en molts ordres de magnitud, que la de la força electrostàtica entre càrregues elèctriques en repòs. Per fer-nos-en una idea, direm que la intensitat de la repulsió electrostàtica entre dos protons supera la seva atracció gravitatòria per un factor de 1039 (un 1 seguit de 39 zeros). Això fa que la interacció gravitatòria sigui completament negligible quan hi ha en joc les altres interaccions.
Existeix una diferència fonamental entre les dues interaccions de llarg abast, l’electromagnètica i la gravitatòria. En el primer cas hi ha càrregues de dos tipus, positives i negatives, i es produeix repulsió entre càrregues del mateix signe i atracció en cas contrari. En canvi, en el cas gravitatori, la interacció sempre és atractiva. Un cos amb una certa massa mai no pot ser neutre gravitacionalment parlant, mentre que si conté el mateix nombre de càrregues elèctriques elementals negatives i positives és elèctricament neutre; amb tot, si les distribucions de càrregues positives i negatives són diferents en el cos, hi romanen alguns efectes, com és el cas d’un dipol. Aquesta possibilitat de "neutralitzar" la interacció electromagnètica és fonamental per tal que la força gravitatòria esdevingui —malgrat ser la força d’intensitat més dèbil entre les fonamentals— la força dominant a escala astronòmica, ja que els objectes estel·lars són elèctricament neutres.
L'estudi dels cossos en equilibri
Els fenòmens que hem examinat fins ara tenen a veure amb els moviments dels cossos i les forces que els generen. Aquests fenòmens interessen dos camps de la física: la cinemàtica, que limita l’estudi al moviment dels cossos, i la dinàmica, que estudia els moviments en relació amb les forces que els produeixen. Però existeix una altra branca de la física que s’ocupa de cossos i de forces. És l’estàtica, una disciplina que estudia els cossos quan no es mouen perquè les forces que actuen sobre ells s’anul·len mútuament. En aquest cas es diu que els cossos són en situació d’equilibri. L’estàtica, doncs, s’ocupa de l’estudi dels cossos en equilibri.
Què és l'equilibri?
Una imatge típica d’equilibri és la que ofereix una balança. Fins no fa gaire, la balança clàssica que es veia a les botigues era la de dos plats; avui, gairebé a tot arreu, es veuen balances d’un sol plat en les quals el pes és indicat per una agulla que es desplaça sobre una escala graduada o bé, en les electròniques, apareix directament com un valor numèric, a vegades fins i tot indicat al costat del preu de la mercaderia. Les balances d’un sol plat tenen incorporada una molla que és comprimida quan posem al plat el que hem de pesar. Si la lectura es fa mitjançant una agulla, aquesta, després d’algunes oscil·lacions de l’indicador, es para en una posició que anomenem posició d’equilibri. Amb aquesta expressió volem dir que la força pes del cos posat al plat de la balança és equilibrada per la reacció elàstica de la molla comprimida.
Un objecte simplement col·locat en un pla horitzontal també dóna una idea intuïtiva d’equilibri, si bé en aquest cas les forces que s’equilibren són el pes del cos i la "reacció" del pla. L’origen d’aquesta reacció sembla més difícil d’explicar. Per simplificar-ho una mica, es pot considerar el pla de suport com un "matalàs" de molles minúscules. En posar-hi un cos al damunt, les molles són comprimides i reaccionen generant una força que n’equilibra el pes. Anàlogament, podem imaginar que entre els àtoms i les molècules que constitueixen el pla de suport hi ha unes molles petitíssimes que són comprimides i que reaccionen quan hi recolza un cos. En realitat, aquestes "molles" no són altra cosa que les forces intermoleculars d’origen electromagnètic que actuen entre una molècula i una altra, o entre un àtom i un altre, i que "mantenen unida" la matèria. Les molècules i els àtoms oscil·len al voltant d’una posició d’equilibri a poca distància de les molècules i dels àtoms propers. Quan s’intenta reduir o augmentar aquesta distància, comprimint o estirant el cos, cal vèncer les forces intermoleculars, que es comporten com si fossin molles infinitament petites.
Un altre cas d’equilibri es presenta en el joc d’estirar la corda. Aquest joc és ben senzill. Dues persones o dues colles agafen una corda cadascuna per un extrem. Tots dos contrincants estiren fort cap a ells i intenten arrossegar el rival. Doncs bé, podem dir que en el moment en què cap de les dues colles no pot guanyar l’altra i la corda queda tensada, però quieta, es produeix una situació d’equilibri. En un altre cas, per exemple quan un vaixell sura a l’aigua, diem que existeix una condició d’equilibri entre la força pes i la força d’empenyiment cap amunt, o força d’Arquimedes, generada per la pressió que l’aigua exerceix sobre la part submergida de l’embarcació.
Deixant de banda petites diferències, aquests exemples tenen una cosa en comú: les forces que actuen sobre els cossos solament són dues i són capaces d’assolir l’equilibri. Aquestes observacions ens permeten assegurar que dues forces s’equilibren quan tenen la mateixa intensitat i actuen en sentit contrari al llarg de la mateixa línia d’acció. Contràriament, la situació d’equilibri es perd quan aquestes forces, encara que mantinguin la mateixa intensitat i actuïn en sentit oposat, ho fan fora d’una comuna recta d’acció.
Tipus d'equilibri
Els exemples que hem descrit més amunt són dels més senzills, però ens han permès veure què s’entén per equilibri d’un cos que es mou solament sobre un pla o una recta. En aquest cas, l’equilibri correspon a la posició de repòs del cos respecte d’un sistema de referència en concordança amb el pla del desplaçament o, molt més en general, respecte d’un sistema de referència solidari amb les parets de l’habitació o del laboratori on es facin els experiments.
Però descobrim fàcilment que existeixen altres tipus d’equilibri, relatius a casos en què el cos no pot desplaçar-se per un pla o una recta, sinó que solament pot girar al voltant d’un eix. Més d’una vegada deveu haver pujat als cavallets d’un parc d’atraccions, constituïts per diversos seients on es col·loquen els nens, disposats en cercle per formar una roda que gira al voltant d’un eix central. Si un parell de nens o més decidissin empènyer els cavallets per fer-los girar en sentit oposat es podria verificar una situació semblant a la del joc de la corda. El grup de vailets que intentessin fer girar els cavallets en sentit horari s’equilibraria amb l’empenta de la colla de nois que volguessin fer-los girar en sentit contrari, i els cavallets quedarien aturats.
Tornant als experiments amb les balances, si en comptes d’una balança de molla, dotada d’un sol plat, fem servir una balança de dos plats, la condició d’equilibri es produirà per raons semblants al cas dels cavallets. En aquest cas, els plats pengen de la barra horitzontal de la balança (o canastró), articulada en el punt central de suport (o fulcre) de manera que pugui oscil·lar a banda i banda. Quan posem un objecte en un plat, el canastró s’inclina cap a aquesta mateixa banda i es desequilibra. Per a restituir l’equilibri, que correspon a la posició horitzontal del canastró i a la vertical de l’agulla sobre el fulcre (posició zero), hem d’anar posant pesos a l’altre plat. Les dues forces no s’eliminen entre elles, com passa en el joc de la corda, perquè no actuen en sentits oposats (ho fan en el mateix sentit, cap avall), però malgrat això s’equilibren.
Les lleis de l'estàtica
Per entendre com podem explicar aquesta última condició d’equilibri, imaginem-nos que fem servir una balança especial, constituïda per un braç rígid col·locat de manera que pugui oscil·lar lateralment, suspès des d’una nansa o punt de suport respecte del qual el canastró no és simètric, ja que de l’extrem més proper, és a dir, el braç més curt, penja el plat de la balança. A l’altre costat, el del braç més llarg, oportunament graduat, es fa córrer un pes fins que la balança queda horitzontal i, després, sobre una escala graduada es llegeix el valor que correspon al pes. Les balances d’aquesta mena s’empren des de l’antiguitat i encara se’n veuen en alguns mercats i en altres indrets.
Es pot comprovar fàcilment que, quan el plat és buit, el braç assoleix la posició horitzontal, d’equilibri, si el pes marcat es correspon amb la marca que indica el zero. En posar al plat la mercaderia que s’ha de pesar, l’equilibri s’obté desplaçant el pes a una distància determinada. Mentre que a les balances utilitzades als mercats el pes sol ser només un, a les balances per a ús didàctic es pot substituir per diversos objectes de pes diferent. Aleshores es veu que una mateixa condició d’equilibri, aconseguida amb un cert pes (que és igual al del producte que cal pesar), es pot obtenir substituint el pes per un de valor doble però col·locant-lo a la meitat de distància, o bé per un pes de la meitat del valor posat a una distància doble. Si mai heu tingut entre les mans un joc d’equilibri, com un d’aquells mòbils que es pengen en les habitacions infantils, que també han inspirat sofisticades obres d’art, deveu haver experimentat una cosa semblant.
En el llenguatge de la física podem dir que la condició d’equilibri no s’assoleix necessàriament quan les forces pes que actuen a banda i banda del canastró de la balança tenen el mateix valor, sinó més aviat quan el producte entre la força pes que actua sobre el plat de la balança i la longitud del braç del plat (o bé la distància del plat al punt de suport) és igual al producte entre el pes pesat i la longitud del braç (la distància al punt de suport).
Podem expressar aquesta condició amb la fórmula:
F1·b1 = F2·b2
essent F1 la força pes que actua sobre el plat, b1 el braç del plat, F2 la força pes del pes pesat i b2 el seu braç. En la balança de mercat, b1 és fix, mentre que b2 varia i correspon a les diverses marques de pes. Hem descobert així una nova propietat associada a les forces.
Les forces també poden produir rotacions, a més de desplaçaments horitzontals, segons la manera com els cossos es vinculen.
En efecte, es diu que un cos és vinculat quan hi actuen forces generades pel mateix vincle (un pla o un eix, per exemple) que només li permeten fer certs desplaçaments i no pas d’altres com pot ser al llarg d’una recta, en un pla o al voltant d’un eix. Per exemple, els rails d’un tren obliguen la locomotora i els vagons a desplaçar-se per aquest camí i a descriure la trajectòria que marca la construcció del traçat de la via. També, en un futbolí, els jugadors només poden girar al voltant de la barra on són collats.
En els casos en què el cos és obligat a desplaçar-se al llarg d’una línia recta, l’equilibri s’estableix amb l’única condició que la suma de totes les forces que actuen sobre el cos sigui nul·la; en canvi, si considerem un cos que també pugui girar al voltant d’un eix cal una altra condició. Per poder expressar de manera general aquesta condició, introduïm ara una nova magnitud, el moment d’una força respecte a un eix. El terme "moment" en el llenguatge de la física posseeix un significat especial. Mentre que en la llengua comuna fa generalment referència a un "breu interval de temps", en física indica la capacitat de produir moviment (notem de passada que el significat que donen els físics a la paraula no és del tot injustificat atès que "moment" és una contracció de "moviment"). Quan obrim o tanquem una porta o, millor encara, un portal gran i pesant, veiem que, si amb la mà fem força sobre el pany, l’esforç és menor que si intentem empènyer-lo fent força sobre un punt més a prop de les frontisses. La mateixa força, doncs, té efectes diferents segons la distància de l’eix o del punt de rotació. Diem que la força té un moment o capacitat de produir moviment que depèn de la distància, i definim el moment d’una força com el producte entre la intensitat de la força i el braç, és a dir, la distància entre la línia d’acció de la força i el punt o l’eix de rotació. Expressant-ho amb una fórmula on M és el moment i b el braç de la força F podem escriure:
M = F b
Observem també que quan apliquem una força, segons si s’exerceix en un sentit o en l’altre, s’obté una rotació horària o antihorària. Per distingir aquests dos casos atribuïm un signe positiu al moment d’una força quan la rotació es dóna en sentit antihorari i un signe negatiu en el cas contrari.
Aleshores podem llegir la fórmula (1) relativa a la balança de mercat dient que, en condicions d’equilibri, el moment M1 de la força F1 és igual i contrari al moment M2 de la força F2. O bé que la suma de tots els moments de les forces que actuen sobre la balança, tenint en compte els signes, és igual a zero. És precisament la condició d’equilibri que buscàvem. Ara estem en situació d’entendre també l’exemple dels cavallets de fira. Si els dos grups de nens empenyen en sentit contrari pot passar que cap dels dos domini sobre l’altre i els cavallets es quedin quiets, perquè la suma dels moments de les forces aplicades per totes dues colles és igual a zero. Les dues condicions d’equilibri, per als cossos que es mouen al llarg d’una línia (moviment de translació) i per als que giren al voltant d’un eix (moviment de rotació), es poden formular en un sol enunciat. Es tracta d’una llei que diu que un cos està en equilibri quan la suma de les forces que hi actuen i la suma dels seus moments respecte de qualsevol punt del cos són iguals a zero.
L'elasticitat
Centrem-nos ara en el tipus de moviment que presenten els cossos elàstics, és a dir, els cossos que si són estirats o comprimits tendeixen a recuperar espontàniament la forma inicial. Potser algunes vegades hem fet amb una goma elàstica un tirador rudimentari amb què hem llançat boletes de paper aixafat. Per experiència, sabem que l’hem d’utilitzar amb compte, perquè si l’estirem massa correm el risc que la goma es trenqui i ens faci mal als dits. També les pilotetes de paper són elàstiques, ja que es deformen quan xoquen contra algun objecte i recuperen després la forma més o menys esfèrica. Hi ha altres cossos igualment elàstics, però més resistents que una goma o una boleta de paper. Per exemple, les molles d’acer, de variades aplicacions en màquines diverses, automòbils i balances, com hem vist fa poc.
No és difícil obtenir molles per a fer experiments. Suposem que en pengem una en posició vertical i que en un ganxo inferior hi anem suspenent pesos de valor cada vegada més alt. Veurem en primer lloc que, a igualtat de pes aplicat, les molles s’allarguen de manera diferent. Les molles més dures s’allarguen menys, i les més toves, més.
Podem observar també que, en una mateixa molla, es duplica l’estirament quan dupliquem el pes. En general, l’estirament és proporcional al pes aplicat. Aquesta proporcionalitat es pot expressar amb la fórmula:
F = k x
La F és la força aplicada; k, una constant coneguda com a constant elàstica de la molla, i x, l’estirament. La constant k és donada per la relació F/x i es mesura en newtons/metre. El seu valor varia segons la molla considerada; així, és més elevat en les molles més dures, que requereixen més força per a ser comprimides o estirades.
Aquesta propietat de proporcionalitat entre la força aplicada i l’estirament produït es pot utilitzar per a construir un instrument de mesura de les forces. És el dinamòmetre, un instrument simple constituït per una molla regulada que permet llegir directament, per a cada valor de l’estirament, el valor de la força corresponent. Les balances comunes d’un sol plat que veiem a les botigues no són més que dinamòmetres basats no en l’estirament sinó en la compressió d’una molla adequadament ajustada. La lectura es fa directament mitjançant unes marques o bé, en les més modernes, per mitjà d’un dispositiu electrònic (balances electròniques).
L’experiència ens ensenya, a més, que una molla també pot patir una deformació permanent si apliquem una força massa intensa. En aquest cas es diu que s’ha superat el camp (o límit) d’elasticitat del cos sotmès a una força (o sistema de forces). Augmentant encara més la força es pot deformar permanentment la molla i fins i tot arribar a trencar-la.
La força elàstica, igual com la reacció d’un pla de suport, és una conseqüència de les forces interatòmiques i intermoleculars que actuen a l’interior d’un cos. Quan comprimim o estirem un cos aplicant una força exterior, cada molècula i cada àtom tendeixen a desplaçar-se de les seves posicions normals d’equilibri i donen origen a forces internes de naturalesa electromagnètica.
Forces, homes i màquines
L’ésser humà ha estudiat les forces per utilitzar-les en benefici seu i, sovint, se serveix d’instruments ideats precisament per explotar les forces de la millor manera possible. Aquests instruments són les màquines. Les màquines són útils perquè permeten aplicar una força i variar-ne les característiques (punt d’aplicació, direcció, sentit i intensitat) de la manera que resulti més convenient. En la vida de cada dia fem servir, gairebé sense adonar-nos-en, màquines de tota mena. Ens són tan familiars que a vegades ens costa considerar-les invents humans. Ens sembla del tot natural recórrer a unes tisores per a retallar un tros de paper, a un ganivet per a llescar el pa, a un tornavís per a enroscar o descargolar un vis, a una maquineta per a fer punta al llapis, a un trencanous per a trencar nous, avellanes i ametlles, o a un obridor per a destapar una ampolla. Cadascun d’aquests instruments simples funciona com una mena de prolongació de les mans, i ens permet aplicar amb més facilitat una força sobre un objecte. De fet, ens resultaria ben difícil, i en alguns casos gairebé impossible, desenroscar un vis o afluixar un cargol només amb les mans, sense recórrer a un tornavís o una clau.
Les màquines que veiem al nostre voltant solen ser molt complexes i no contenen solament elements mecànics, sinó també dispositius elèctrics i electrònics. Però, des del punt de vista mecànic, són descomponibles en un gran nombre de màquines o instruments simples, que es poden reduir bàsicament a la corda, a un cos giratori al voltant d’un eix (palanca, politja) i al pla inclinat. Podem practicar aquesta operació de descomposició observant amb atenció algunes màquines complexes i mirant de desmuntar-les en un conjunt de màquines simples relacionades. En una bicicleta, per exemple, el sistema de frens pot descompondre’s en una combinació de palanques i cordes (cables i cadena), mentre que el conjunt constituït pels pedals, el canvi i el botó (peça de l’eix de la roda) presenta una complicada combinació de rodes que es poden reduir al principi de funcionament de la politja. També en una màquina d’escriure és fàcil veure un gran nombre de palanques que uneixen les tecles i les lletres. En prémer una tecla, són les palanques els elements que permeten estampar sobre el paper la lletra desitjada.
La corda és la "màquina" més elemental, ja que serveix per a fer més còmoda l’aplicació d’una força sobre un objecte en traslladar el punt d’aplicació al llarg de les fibres de la corda. Deixant de banda el seu pes, la força es transmet al llarg de tots els punts de la corda amb la mateixa intensitat. Per verificar-ho directament podem fer un experiment en el qual unirem diversos trams de corda mitjançant dinamòmetres. Si estirem un objecte amb aquesta corda veurem que tots els dinamòmetres indiquen el mateix valor. Una aplicació comuna de la corda és la tracció d’un cotxe. En els ascensors i els funiculars trobem un sistema més complex de cordes que permet aplicar la força generada per un motor a la cabina que transporta persones o mercaderies.
La politja i la palanca són dos exemples de cossos articulats en un eix al voltant del qual poden girar. També són tan comunes que sovint no hi parem esment. La politja es considera una màquina simple per bé que normalment és constituïda, a més de la roda, per una corda que passa per una ranura externa. Probablement heu vist més d’una vegada com els treballadors de la construcció les fan anar per pujar o baixar pesos (maons, sacs de ciment o runa) en una obra. En un extrem de la corda es fixa el pes que s’ha d’aixecar, mentre que a l’altre extrem s’aplica la força de tracció. La condició d’equilibri es dóna quan el moment de la força de tracció és igual al de la força pes. Totes dues forces es troben a la mateixa distància de l’eix de rotació, és a dir, tenen el mateix braç, que és igual al radi de la politja i, així, perquè els moments siguin iguals també ho han de ser les dues forces. En aquest cas, com en la corda, no s’obté cap "avantatge" perquè la força aplicada té un valor igual a la que s’ha d’equilibrar. Amb tot, la utilitat d’aquesta màquina rau en el fet que permet modificar tant el punt d’aplicació com el sentit de la força. En efecte, de vegades, pot resultar més convenient aixecar un cos mitjançant una politja i no directament, atès que la politja permet aplicar la força des de dalt cap a baix i no en sentit contrari.
La palanca també està constituïda per un cos giratori al voltant d’un punt de suport, que s’anomena fulcre; però, a diferència de la politja, que manté invariable la forma característica de roda, la palanca pot adoptar formes molt diferents, fins al punt que a vegades és difícil identificar-les totes com si es tractés d’una mateixa cosa.
Les tisores, els trencanous o les pinces són exemples d’instruments que utilitzen el principi de la palanca. Així mateix, l’eix d’una balança de braços iguals o desiguals com una balança de mercat és un exemple de palanca. En tots aquests dispositius podem distingir la força que apliquem, normalment amb les mans, de la força que volem vèncer i que anomenem força resistent, que és, per exemple, la resistència que ofereix la closca de la nou que volem trencar. En aquest cas la condició d’equilibri és establerta per la llei general de l’estàtica per als cossos que poden girar. La palanca està equilibrada si el moment de la força aplicada és igual al de la força resistent, segons la fórmula:
Fa · ba = Fr · br
Fa i Fr són la força aplicada i la resistent respectivament, i ba i br, els seus braços respecte al fulcre.
Se solen distingir tres tipus de palanca, segons que el fulcre es trobi entre la força aplicada i la resistent (palanca de primer gènere, com les pinces, les tisores o les tenalles), sigui extern i més a prop de la força resistent (palanca de segon gènere, com el trencanous) o es trobi més a prop de la força aplicada (palanca de tercer gènere, com les pinces per al gel).
En el primer cas, si es vol que la força aplicada (potència) sigui menor que la força resistent (resistència) cal construir la palanca de manera que el braç de la força aplicada sigui més gran que el de la força resistent. És per aquesta raó que en les pinces l’empunyadura és molt més llarga que la distància entre el pern i el fulcre. En el trencanous, la distància entre el punt on apliquem la força i el fulcre sempre és més gran que la que separa la nou del fulcre. Per aquest motiu la força aplicada sempre serà menor que la força resistent, com podem comprovar si mirem d’obrir una nou sense recórrer al trencanous. Aquest és, doncs, l’avantatge de l’ús de la palanca —que, com hem vist, la politja no ofereix—, és a dir, que es pot obtenir un resultat determinat, per exemple trencar una nou, amb un esforç menor que el que caldria si només féssim servir les mans. En les pinces per a gel o en les tenalles llargues per a la llar de foc, passa exactament al revés, ja que la distància entre l’objecte que agafem amb l’extrem de la pinça i el fulcre sempre és més gran que la distància entre el lloc per on agafem les pinces i el fulcre. Per tant, hem de fer més esforç, però tot i això preferim fer servir les pinces per no embrutar-nos o cremar-nos, o per raons higièniques en el cas dels glaçons.
Com ja hem apuntat, no estem acostumats a identificar les màquines simples en les aplicacions més comunes, i per això ens sorprèn pensar que els carrers que fan pujada no són sinó un exemple de pla inclinat, com també ho són el tobogan d’una zona d’esbarjo infantil o les muntanyes russes dels parcs d’atraccions. En tots aquests exemples el pla inclinat permet equilibrar una força pes recorrent a una força d’intensitat menor. Per a pujar un pendent resulta més còmode un recorregut menys inclinat, encara que sigui més llarg, que un de més costerut.
En molts instruments comuns el pla inclinat troba aplicació en forma de falca. La punta d’un tornavís, per exemple, és inclinada per tots dos costats, com també ho són els ganivets i les tisores. També la punta d’un clau té forma de tascó arrodonit. Si mirem de clavar amb un martell un clau despuntat en un tros de fusta o a la paret haurem de fer un gran esforç i en molts casos no aconseguirem res perquè el clau es doblarà i no hi entrarà. De la mateixa manera, si en comptes d’una destral féssim servir un tros de ferro per a fer llenya, de seguida ens adonaríem que l’empresa és inútil i desesperada. Mentre que en un pla inclinat pretenem equilibrar una força pes, en els instruments que hem descrit hem de vèncer les forces de cohesió interna dels cossos, que es manifesten quan mirem de penetrar-ne la superfície.
El fregament
Per explicar el funcionament de les màquines, fins ara hem parlat d’una força aplicada a la qual es contraposa una força resistent. Aquest és un esquema bastant simple, que ens permet il·lustrar amb més claredat els fenòmens físics. Però en realitat sempre existeix una altra força que obstaculitza el moviment dels cossos. Es tracta del fregament. Solament els cossos que es mouen en el buit, sense contactes amb altres cossos (per exemple un planeta), no són sotmesos al fregament.
L’experiència del fregament és molt comuna. Si hem d’arrossegar una caixa per terra, veiem que si el terra i la caixa són rugosos ens cal un gran esforç, i potser ni tan sols la podrem moure. Però si el terra i la caixa són llisos, l’esforç requerit per a empènyer-la és menor. Si la caixa té rodes, encara és més fàcil desplaçar-la. La força de fregament és determinada, doncs, pel contacte d’un cos amb un altre, i depèn essencialment del pes dels cossos i de la naturalesa de la superfície de contacte. Si la superfície és rasposa, el fregament és fort, perquè les aspreses dels dos cossos s’encasten les unes en les altres i bloquen el moviment. En canvi, si és llisa, es desplacen molt millor. Si s’empren rodes, els dos cossos no s’arrosseguen l’un sobre l’altre (fregament rasant) sinó que roden (fregament rodant).
El fregament rodant sempre és molt menor que el rasant. És per això que convé transportar els objectes, posem per cas, en carretons dotats de rodes, més que no pas arrossegar-los sense rodes pel terra. Per aquest motiu, en els casos en què es vol disminuir el fregament, es mira de convertir-lo de rasant a rodant. En les màquines de la família del trepant, per exemple, s’aconsegueix amb l’ús de coixinets de rodes. En altres casos, en canvi, es vol obtenir el màxim fregament, com amb els frens de les bicicletes o dels cotxes, gràcies al qual bloquen el moviment de les rodes.
Propietats dels líquids i els gasos
Hem exposat abans les lleis de l’estàtica, que són les lleis que regulen els cossos en equilibri, però només ens hem referit als cossos sòlids. En els fluids (líquids i gasos), les lleis fonamentals de la física, si bé són les mateixes, poden produir efectes especials. En efecte, a diferència dels sòlids, que tenen un volum i una forma propis i només poden ser deformats per forces prou intenses, els líquids tenen un volum propi dins una forma variable, que depèn de la del recipient que els conté. Els gasos no tenen ni volum ni forma estables. Els líquids i els gasos són, doncs, molt més "mòbils" que els sòlids i s’hi verifiquen diferents fenòmens que val la pena considerar de més a prop.
Què és la pressió?
La pressió és un concepte físic molt important, que no afecta solament els fluids sinó també els sòlids, tot i que és ens els primers on manifesta els seus aspectes més interessants i per això en aquest article no n’hem parlat abans. Juntament amb la temperatura, la pressió determina les principals característiques quimicofísiques dels fluids (vegeu "Matèria i energia") i és a la base d’alguns dels fenòmens més significatius de líquids i gasos.
Però per explicar què és la pressió farem referència a un cos sòlid especial, la neu, la qual, com que és poc compacta, permet estudiar bé aquesta mena de fenomen. Si passegem per un prat amb neu acabada de caure, se’ns hi enfonsen els peus, però si ens posem esquís ens hi enfonsem molt menys. Amb els esquís calçats no esdevenim més lleugers —evidentment continuem pesant el mateix—, però ens enfonsem molt menys en la neu. Com és això?
El motiu és que la sola de les sabates té una superfície notablement menor que la dels esquís i per això el nostre pes es concentra més, mentre que els esquís el distribueixen en una superfície més àmplia. Si una persona pesa 40 kg, i les dues sabates tenen en conjunt una superfície de 400 cm2, cada centímetre quadrat de sola exerceix sobre la neu de sota un pes de 0,1 kg (xifra que resulta de la divisió 40 : 400), és a dir, 100 g. Quan es posa els esquís, com que tenen una superfície més gran (per exemple, 4 000 cm2), cada centímetre quadrat de la sola dels esquís exerceix sobre la neu un pes de 0,01 kg (40 : 4 000), és a dir, 10 g. Aleshores resulta evident el motiu pel qual amb els esquís l’enfonsament és més petit que amb les sabates, atès que cada unitat de superfície exerceix sobre la neu un pes deu vegades inferior. En altres paraules, el pes per unitat de superfície és més baix. Aquesta relació, entre una força i l’àrea de la superfície sobre la qual s’exerceix, s’anomena pressió. En termes científics, es diu que la pressió és la relació entre la força perpendicular a una superfície i l’àrea de la superfície mateixa. Ho expressa la fórmula:
essent p la pressió, F la força i S l’àrea de la superfície. En el sistema internacional la unitat de mesura de la pressió és el pascal (Pa), que equival a la pressió exercida per la força d’1 newton sobre la superfície d’un metre quadrat, o sigui, 1 Pa = 1 N/m2. Però normalment s’usen altres unitats de mesura com l’atmosfera (1 atm = 1,013 · 105 Pa) i el bar (1 bar = 105 Pa). L’instrument que permet mesurar la pressió és el manòmetre, del qual existeixen diversos tipus.
La pressió en els líquids
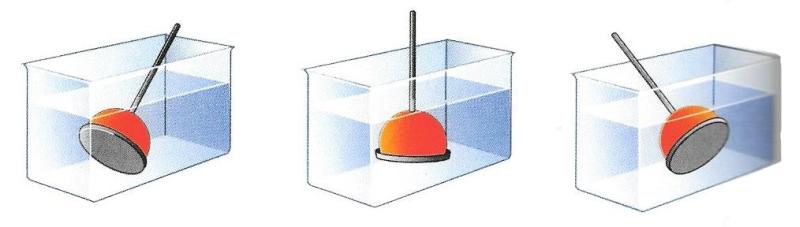
En introduir en un recipient ple de líquid un objecte buit i amb l'obertura tapada (com un desembussador proveït d'una tapadora o un vas tapat amb una cartolina), la pressió del líquid manté la tapa adherida a l'objecte en qualsevol posició.
ECSA
Per entendre millor l’efecte de la pressió sobre un fluid considerem aquesta experiència. Omplim d’aigua una pilota de goma en la superfície de la qual hem practicat molts forats, i després l’esclafem una mica amb la mà. L’aigua surt per tots els forats, és a dir, en totes direccions. La mà ha exercit una acció sobre el líquid, però no de manera directa, sinó sobre la superfície de la pilota. La relació entre força i superfície ens dóna la intensitat de l’acció, és a dir, la pressió exercida sobre el líquid. El fet que el líquid surti amb la mateixa intensitat per tots els forats, independentment de la seva posició, significa que a l’interior de la massa líquida l’acció exercida s’ha repartit en totes les direccions de la mateixa manera.
La conclusió científica de l’experiment es pot resumir dient que la pressió exercida sobre una part del líquid es transmet amb la mateixa intensitat en totes direccions. És una llei que anomenem principi de Pascal, en honor a Blaise Pascal, físic, matemàtic i filòsof francès que el va enunciar. Aquest principi és de gran importància i permet explicar per què les accions sobre els fluids són representables amb la pressió i no amb la força. L’exemple clàssic per a il·lustrar-ho és el que podem anomenar "la bóta que esclata".
Imaginem-nos que tenim una bóta plena d’aigua ben tancada per una tapa i que hi disposem al damunt un recipient que conté més aigua. A la bóta no li passa res. El recipient ple d’aigua exerceix una pressió que la tapa de la bóta és capaç de suportar. Ara suposem que traiem el recipient i al seu lloc connectem un tub vertical d’uns 5 metres d’alçada, que omplim amb la mateixa quantitat d’aigua que abans contenia el recipient que havíem disposat sobre la tapa. Obtindrem un efecte ben diferent d’abans, perquè la bóta esclatarà. Com s’explica això? La força (pes) exercida per l’aigua ha continuat invariable, però la superfície sobre la qual la força actuava ha disminuït molt. Per tant, la pressió ha augmentat notablement. Aquesta pressió, a més, s’ha repartit a l’interior de la bóta en totes direccions, de tal manera que l’ha fet esclatar. Així, doncs, amb la mateixa força, es poden obtenir efectes ben diferents quan la pressió també és diferent.
La premsa hidràulica
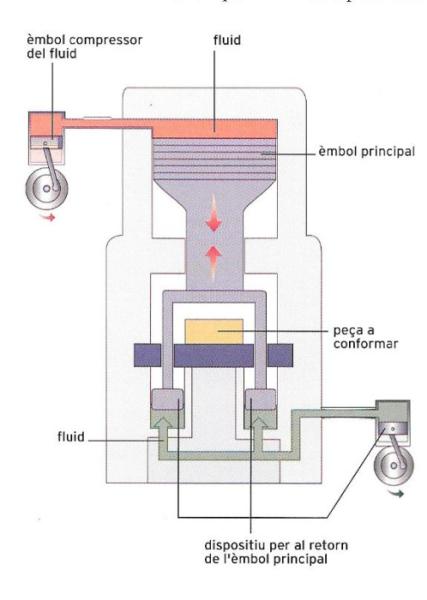
Premsa hidràulica vertical, que requereix només una pressió molt petita en l'èmbol compressor del circuit del fluid per a obtenir una força considerable en l'èmbol principal, el qual retorna a la posició inicial després de completar un treball determinat.
ECSA
Un aparell molt important, que utilitza els mecanismes de la pressió, és la premsa hidràulica. És un sistema compost per dos cilindres, diguem-ne A i B, de diàmetre diferent, units entre ells i plens d’un fluid. Quan a les superfícies del fluid en A i B actuen les mateixes pressions, es mantenen al mateix nivell. Això significa que, si apliquem una força a la superfície de B, per a mantenir el sistema en equilibri cal aplicar també una força a la superfície de A. Com que per a mantenir el sistema en equilibri les pressions han de ser iguals, atès que la superfície de A és molt més petita que la de B, n’hi haurà prou a aplicar una força modesta a la superfície de A per a equilibrar la força intensa aplicada a B. Per això, el sistema es pot emprar per a desplaçar objectes pesants, ja que, recolzats en B, són empesos cap amunt, gràcies a forces molt petites aplicades a A.
El comportament de la premsa hidràulica pot semblar gairebé paradoxal, perquè sembla que dues forces molt diferents aconsegueixen equilibrar-se en l’aparell. Però, en realitat, les que s’equilibren són només les pressions. Mirem d’entendre-ho millor fent referència a la mecànica dels sòlids. Quan la premsa hidràulica està funcionant, les forces aplicades en A i B treballen, és a dir, desplacen les superfícies de A i B de la seva posició inicial. Això equival a dir que una mica del líquid contingut en A es trasllada al recipient B. Però com que B té un diàmetre més gran, s’esdevé que a cada desplaçament de A correspon un desplaçament en alçada molt menor en B. Si multipliquem la força aplicada a A pel desplaçament de la superfície de A, i la força aplicada a B pel desplaçament de la superfície de B, veurem que els dos productes obtinguts són iguals. En mecànica, aquest producte s’anomena treball (vegeu "Energia, treball i calor").
Així, doncs, es pot constatar que el treball fet en A és exactament el mateix que en B. La premsa hidràulica, doncs, també compleix les lleis de la física. No és capaç de "crear" treball. No és sinó un sistema que agafa el treball de A i el transporta a B.
Pressió hidrostàtica i vasos comunicants
Fins ara hem tractat de les pressions que s’exerceixen sobre un líquid i que aquest líquid pot transmetre (vegeu "La premsa hidràulica"). Però el líquid per ell mateix també exerceix una pressió, deguda al seu pes. El pes del conjunt de les partícules d’un líquid produeix, en cada punt de l’interior de la seva massa i sobre les parets del recipient que el conté, una pressió que s’anomena pressió hidrostàtica.
Vegem ara algunes de les principals propietats dels líquids pel que fa a la pressió hidrostàtica.
1) En cada punt interior d’un líquid la pressió hidrostàtica és igual en totes direccions. En cada punt del líquid actua, doncs, un conjunt de forces que s’equilibren entre elles. Podem comprovar aquesta afirmació introduint en un líquid un objecte buit amb una obertura sobre la qual recolzem una tapa prima, com per exemple un desembussador o un vas tapat amb una cartolina. Sigui quina sigui la posició de l’objecte dins el líquid, la tapa queda sempre en contacte amb la boca de l’objecte, perquè és mantinguda en aquesta posició gràcies a la pressió del líquid circumdant.
2) El líquid exerceix sobre les parets del recipient que el conté una pressió perpendicular a la superfície. En efecte, si foradem les parets del recipient veurem que el líquid vessa pels forats en direcció perpendicular a la superfície de la paret. La desviació successiva és provocada per la força de la gravetat.
3) En cada punt d’una secció horitzontal d’un líquid actua una pressió hidrostàtica P, que incrementa la pressió atmosfèrica existent a la superfície i que és igual al producte de la distància de la superfície lliure, h, pel pes específic, Pe (o pes d’una unitat de volum del líquid), és a dir:
P = h Pe
En altres termes, això significa que la pressió hidrostàtica augmenta a mesura que augmenta la profunditat a l’interior del líquid, perquè és més elevat el pes de la massa líquida de sobre. Això es pot verificar introduint un manòmetre (mesurador de pressió) a nivells diferents en líquids de diversa densitat.
Les propietats que hem enumerat són la causa d’alguns fenòmens interessants:
a) La superfície lliure d’un líquid en repòs és plana i horitzontal. Per superfície lliure s’entén la que no està ocupada per cap altre líquid. Totes les partícules que hi ha estan sotmeses, per aquesta raó, a la mateixa pressió (l’atmosfèrica) i per aquest motiu romanen en el mateix pla horitzontal.
b) Si es connecten entre ells alguns recipients de manera que el líquid pugui passar fàcilment de l’un a l’altre, aleshores el nivell del líquid serà idèntic en tots ells. Aquest fenomen, anomenat dels vasos comunicants, s’explica pels mateixos motius assenyalats més amunt. En aquest cas, les partícules superficials de cada vas, sotmeses a la mateixa pressió atmosfèrica, també es troben en el mateix pla horitzontal.
c) Quan líquids que no es barregen entre ells es troben junts dins el mateix recipient, es disposen de manera que el que té un pes específic més elevat ocupa la part inferior, però la superfície de separació entre els líquids és plana i horitzontal.
El principi d'Arquimedes
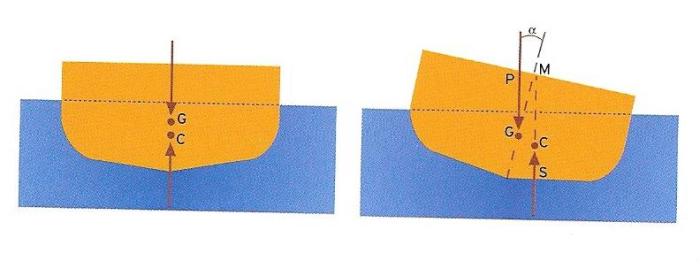
El primer dibuix, a l'esquerra, mostra un cos flotant (un vaixell, per exemple) en posició d'equilibri, on G és el centre de la gravetat i C, el centre d'empenyiment, i les forces que hi actuen tenen la mateixa línia d'acció i són d'intensitat igual però oposada. Quan s'altera la posició d'equilibri (en el segon dibuix), la pressió hidrostàtica S, aplicada al centre d'empenyiment C, i la força de pes P, aplicada al centre de gravetat G, continuen essent iguals i oposades, però ja no tenen la mateixa línia d'acció.
ECSA
Imaginem-nos ara que aïllem una quantitat de líquid en condició d’equilibri que té un volum V i el pes del qual és indicat pel vector Pr. Com que hem dit que el líquid està en equilibri, cal que la força pes que exerceix sigui equilibrada per una força de la mateixa intensitat i direcció, però de sentit contrari. Per tant, podem establir que la massa de líquid circumdant es comporta de tal manera que exerceix un conjunt de forces sobre el volum interior, la resultant de les quals és d’intensitat i direcció iguals a la força pes de la porció de líquid, però de sentit contrari.
Imaginem-nos ara que substituïm la quantitat de líquid per una altra substància del mateix volum però de pes diferent, P’. Evidentment, la massa de líquid circumdant és sempre la mateixa, i per tant també l’acció que exerceix (és a dir, la força fr). En canvi, la força pes del cos Pr’ i el seu punt d’aplicació varien. És evident que si fr és més gran que Pr’, la resultant de les dues forces imprimirà al cos un empenyiment cap amunt i el portarà fins a la superfície del líquid (el cos flota, doncs). En el cas contrari (fr menor que Pr’), el cos rep una força directa cap avall, que l’empeny cap al fons.
Tot el que s’acaba d’exposar se sintetitza en el principi d’Arquimedes, segons el qual un cos submergit en un líquid rep un impuls vertical cap amunt d’intensitat igual al pes del líquid que desallotja. El motiu pel qual els cossos de certes formes floten a la superfície de l’aigua rau precisament en aquest principi. Per tal que un cos es mantingui en equilibri a la superfície de l’aigua cal que desallotgi una quantitat de líquid capaç de produir un empenyiment que pugui equilibrar el pes del mateix cos.
Gràcies al principi d’Arquimedes, hem revelat el "misteri" de la flotació. Així, un cos flota quan pesa menys que l’aigua que desallotja. Un got buit flota perquè pesa poc i, en canvi, desplaça molta aigua. El mateix got, ple de llet, s’enfonsa perquè, tot i desplaçar la mateixa quantitat d’aigua, pesa més. Per això, si volem construir un objecte que suri cal fer-ho de tal manera que pesi menys que l’aigua desplaçada. Un vaixell desplaça molta aigua però, com que pesa menys que aquesta, no s’enfonsa. I el mateix passa amb un salvavides de grans dimensions, que resulta molt lleuger gràcies al fet de desplaçar molta aigua. Un cos fet d’un material molt més pesant que l’aigua també pot flotar, sempre que tingui cavitats interiors de manera que l’aigua desplaçada pesi més que el cos. És el que passa amb els vaixells de buc de ferro, que són buits per dins.
La capil·laritat
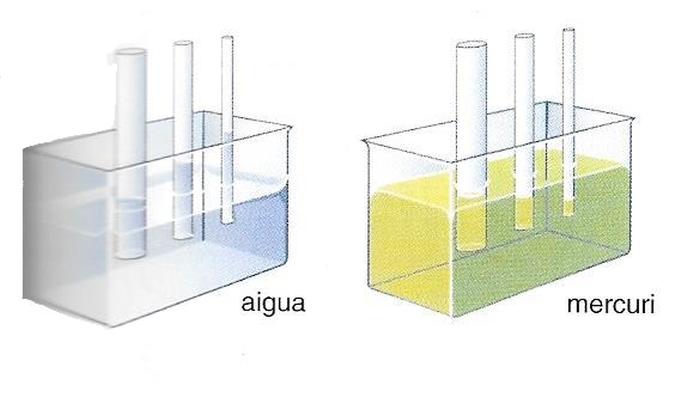
El fenomen de la capil·laritat es manifesta sobretot en tubs molt prims. Quan les formes de cohesió interna del líquid prevalen sobre les d'adhesió entre el líquid i les parets, com en el cas de l'aigua, el líquid "puja" per les parets del tubet. Amb el mercuri passa a l'inrevés, ja que el líquid "baixa" per les parets del tub.
ECSA
Hem dit més amunt que les superfícies lliures dels líquids són planes i horitzontals. Però si observem amb atenció l’aigua continguda en un vas podem veure que, a prop dels punts de contacte amb el recipient, la superfície del líquid adquireix generalment una forma corbada. Aquest fenomen s’explica pel fet que les partícules que constitueixen totes les substàncies estan subjectes a forces de cohesió i d’adhesió. Les forces de cohesió o d’atracció s’estableixen entre les partícules de la mateixa substància, mentre que les forces d’adhesió actuen per mantenir-les unides a altres substàncies. En el nostre cas, les forces de cohesió mantenen unides les partícules de líquid i les d’adhesió les mantenen unides a les parets del vas.
Generalment, la intensitat d’aquests dos tipus de força no és idèntica. Per això, quan prevalen les forces de cohesió, les partícules a prop de les parets del recipient formen una superfície convexa; en canvi, quan prevalen les forces d’adhesió, el líquid tendeix a ocupar tant com pot les parets, i la seva superfície esdevé còncava. Quan la superfície lliure d’un líquid és molt reduïda, com passa quan s’hi immergeix un vas capil·lar, això és, un tub molt prim, es pot observar una elevació o un descens del nivell del líquid a l’interior del capil·lar respecte de la superfície externa. El descens es pot explicar amb el predomini de les forces de cohesió sobre les d’adhesió, que tendeixen a mantenir el mínim contacte possible entre el líquid i la paret. La superfície del líquid en el capil·lar adopta en aquest cas una forma convexa. En el cas contrari, les forces d’adhesió a la paret són capaces de mantenir el desnivell i la superfície del líquid adquireix una forma còncava. Els desnivells apreciats són inversament proporcionals al diàmetre del capil·lar.
Tot el que hem observat és una limitació evident del principi dels vasos comunicants, exposat justament una mica abans, que continua essent vàlid per als recipients que permeten al líquid tenir superfícies lliures prou extenses. El fenomen descrit és de gran importància en l’àmbit de la natura, i especialment en les plantes. La capil·laritat permet explicar l’ascens de la saba pel tronc, des del sòl fins a les fulles, les flors i els fruits.
Estàtica dels gasos
Els gasos són substàncies evanescents i, de tan lleugeres que semblen, fan l’efecte de no tenir pes. El gas és un estat en què la matèria es presenta molt poc cohesionada. Els gasos no tenen una forma ni un volum definits, sinó que ocupen uniformement i totalment els recipients que els contenen. Una substància en estat gasós té sempre menor densitat que en estat sòlid o líquid, ja que les molècules del gas estan força més separades. En temps dels grecs antics, els filòsofs van discutir llargament per determinar si l’aire pesava o no. Per exemple, Aristòtil dubtava que l’aire pesés. Per assegurar-se’n va pesar una bóta, primer buida i després plena d’aire, pensant que, si l’aire pesava, la bóta hauria de pesar més en el segon cas que en el primer. Però l’experiment no va confirmar les previsions d’Aristòtil, i consegüentment va concloure que l’aire no pesava. No es van fer progressos importants en aquest camp fins al segle XVII amb les intuïcions de Galileu sobre el pes de l’aire i l’experiment de Torricelli sobre la pressió atmosfèrica (vegeu "L’atmosfera terrestre i el clima").
El 1650 l’alemany Otto von Guericke va aconseguir demostrar experimentalment que l’aire tenia un pes, i en va determinar el valor. Havia inventat una màquina pneumàtica amb la qual aconseguia crear un buit a l’interior d’un recipient. Va fer un experiment semblant al d’Aristòtil. Va pesar un globus de vidre ple d’aire i el va tornar a pesar després de treure’l mitjançant la màquina pneumàtica. D’aquesta manera va aconseguir comprovar, efectivament, que el globus buit pesava menys que el globus ple d’aire i va establir que 1 l d’aire pesa aproximadament 1,29 g. Per què, doncs, l’experiment inventat per Aristòtil no havia tingut èxit? L’explicació rau en el fet que el volum de la bóta de cuir canvia quan s’infla. Consegüentment, aquesta bóta inflada d’aire pateix l’efecte de l’impuls d’Arquimedes que compensa de manera exacta el pes de l’aire. La intuïció d’Aristòtil era correcta, però l’experiment no podia evidenciar el pes de l’aire. Avui és un fet comunament acceptat que els gasos, com totes les substàncies, tenen un pes propi i per tant podem aplicar-los les mateixes lleis que regulen el comportament de les substàncies líquides.
Per això, una substància gasosa produeix en tots els seus punts una pressió que es transmet en la mateixa mesura en totes direccions; i un cos immergit en un gas rep d’aquest un impuls cap amunt d’intensitat igual al pes del gas desallotjat. Aquesta darrera propietat explica per què els globus aerostàtics floten en l’aire, on es mantenen molt enlairats i en equilibri gràcies a grans volums de gasos més lleugers que l’aire.
L’atmosfera terrestre no és altra cosa que una massa de substàncies gasoses que embolcalla la Terra i s’hi manté gràcies a l’atracció gravitacional exercida sobre les partícules que la componen. En cada punt d’aquesta massa s’exerceix, doncs, una pressió que s’anomena atmosfèrica. Podem observar l’existència i l’entitat de la pressió atmosfèrica mitjançant l’experiment de Torricelli (vegeu "L’atmosfera terrestre i el clima"). La pressió atmosfèrica, que es mesura mitjançant el baròmetre, depèn de la situació geogràfica i climàtica del lloc de la Terra que es consideri. És variable i està influïda per molts factors. La pressió disminueix amb l’altitud. A mesura que ens allunyem del nivell del mar, l’aire esdevé més enrarit i, per això, "pesa" menys.