Resultats de la cerca
Es mostren 4 resultats
compactar
Electrònica i informàtica
Desplaçar físicament fitxers, biblioteques o carpetes dins d’un suport d’emmagatzematge i concatenar-los de manera que es concentri en una única àrea indivisa tot l’espai que no s’utilitza.
El que es redueix és l’espai que en una situació ideal ocuparien les dades, sense que això signifiqui que en la situació concreta considerada també s’hagi de reduir l’espai ocupat Un cas típic on l’espai ideal i el real no és el mateix és el de la dispersió física de les dades a causa de la fragmentació del suport d’emmagatzematge llavors cal usar part de l’espai d’emmagatzematge per a mantenir els lligams entre les dades, de tal manera que s’hi pugui accedir com un tot, sense necessitat de conèixer-ne la fragmentació física En aquest cas, la compactació reduirà l’espai real usat Els mètodes…
senyal de sincronisme
Electrònica i informàtica
Senyal que té els mateixos atributs i funcions que el senyal de rellotge però que no és necessàriament repetitiu ni té un període constant.
La unitat que té com a sortida el senyal de sincronisme és anomenada generador de senyal de rellotge i sol contenir un oscillador
robot
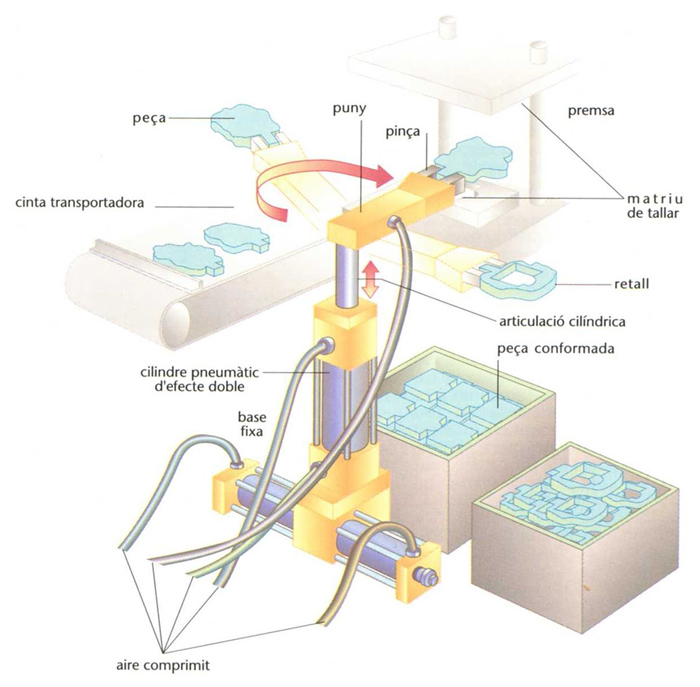
Robot de manipulació, d’un sol eix amb dos graus de mobilitat i accionament pneumàtic, equipat amb un terminal de pinça
© Fototeca.cat
Tecnologia
Electrònica i informàtica
Màquina automàtica capaç de manipular objectes, executar operacions i moviments diversos segons un programa que pot ésser modificable o adaptable, i que pot anar equipat amb sensors per tal de detectar els senyals d’entrada i les condicions ambientals.
Segons el seu comandament els robots poden ésser dirigits a distància quan reprodueixen moviments o ordres d’un generador remot, regulables quan executen moviments concrets mitjançant comandes manuals, programables si llurs moviments són guiats per un programa i intelligents si, a més, tenen capacitat per a modificar llur comportament d’acord amb l’observació de l’entorn per mitjà de sensors El mot “robot” del txec robota , ‘treball forçat’ fou creat per l’autor dramàtic Karel Čapek-Chod el 1920 en una de les seves peces de teatre, RUR Rossum's Universal Robots, per denominar un androide…
senyal de rellotge
Electrònica i informàtica
Senyal bàsic repetitiu que hom usa per a controlar la successió temporal de totes les operacions síncrones en les màquines d’un sistema informàtic i també en processos de transformació de senyals.