Segons el seu comandament els robots poden ésser dirigits a distància (quan reprodueixen moviments o ordres d’un generador remot), regulables (quan executen moviments concrets mitjançant comandes manuals), programables (si llurs moviments són guiats per un programa) i intel·ligents (si, a més, tenen capacitat per a modificar llur comportament d’acord amb l’observació de l’entorn per mitjà de sensors ). El mot “robot” (del txec robota , ‘treball forçat’) fou creat per l’autor dramàtic Karel Čapek-Chod el 1920 en una de les seves peces de teatre, R.U.R. (Rossum's Universal Robots), per denominar un androide construït per un savi i capaç de dur a terme tots els treballs normalment excecutats per un home. Des de l’antiguitat, la realització de mecanismes animats mitjançant dispositius hidràulics, politges, palanques, engranatges i ressorts ha estat una constant en l’evolució de la humanitat (autòmat) . Molts foren ja descrits per la mitologia clàssica i oriental. Com a exemples d’aquesta evolució hi ha les estàtues de Dèdal, que es movien soles, les aus que construí Heró d’Alexandria, que volaven, refilaven i bevien, el lleó animat de Leonardo da Vinci, el flautista de Vaucanson, les joguines actuals, etc. Tots aquests autòmats, però, difereixen dels robots actuals en el fet que aquests estan relacionats amb la idea de treball. El fet que permeté que els robots tinguessin la capacitat d’efectuar un treball útil fou l’aparició de les tecnologies del control automàtic i dels ordinadors. Els robots constitueixen un nou estadi, després dels de mecanització i automatització en la progressiva substitució de certes activitats humanes (esforç, observació-decisió, coordinació) per dispositius artificials. L’exemple més interessant d’aplicació són els robots industrials , eines programables que presenten nombrosos avantatges respecte als simples manipuladors. Necessiten un o diversos processadors i utilitzen llenguatges específics i diferents dels habituals a causa que l’entorn en el qual actuen generalment no pot ésser descrit en termes purament quantitatius i és necessari poder incloure accions subjectes a imprecisions, així com informacions sensorials ambigües i difícils de processar en temps real. Així, hom pot programar una seqüència d’operacions que seran repetides idènticament i de forma cíclica o bé introduir variables, el valor de les quals depèn de la informació adquirida en temps d’execució a través dels sensors, i que facilita l’interactivitat en temps de programació. Els aspectes claus són l’adaptabilitat a diferents sistemes, la capacitat d’interacció sensorial i els elements perifèrics per a comunicar-se amb l’entorn. El reconeixement de l’escriptura , el reconeixement de la paraula , el reconeixement de formes , la percepció visual i les altres àrees de la intel·ligència artificial aplicats als robots industrials augmenta notablement llur capacitat d’adequació a l’entorn i els permet de localitzar peces que apareixen en l’àrea de treball en posicions no predeterminades o seleccionar una peça d’entre unes quantes. Les principals aplicacions dels robots industrials són la realització automàtica d’una sèrie d’operacions de fabricació (muntatge, soldadura, pintura, etc) que poden ésser comandades per un sistema central de disseny i fabricació per ordinador (DAO/FAO); també són útils per a treballs i tasques sobretot de tipus fatigant, repetitiu o perillós i especialment en ambients de temperatura, pressió o radiacions difícilment suportables per a l’home, com és el cas de centrals nuclears, i en aplicacions submarines i espacials. També tenen aplicacions en la tecnologia de les pròtesis biònica . Són molt utilitzats els robots mòbils autònoms, els quals reemplacen l’home en llocs hostils (camps de batalla, espai, central nuclear, etc) i en tasques enutjoses i repetitives (neteja, manutenció, manteniment, etc).
m
Electrònica i informàtica
Tecnologia
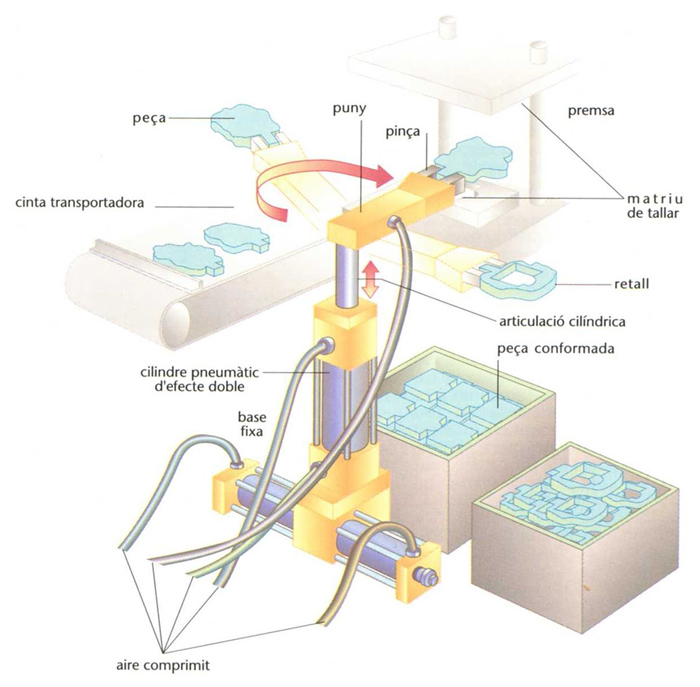
Robot de manipulació, d’un sol eix amb dos graus de mobilitat i accionament pneumàtic, equipat amb un terminal de pinça
© Fototeca.cat