Una projecció consisteix, en essència, a especificar un mètode per a fer correspondre els punts del globus terraqüi (sia representat en la forma d’una esfera, d’un el·lipsoide o d’un geoide) amb els punts del pla escollit, que és necessàriament el resultat del desenvolupament d’una superfície desenvolupable. La correspondència entre els punts del globus i els punts de la superfície desenvolupable pot fer-se de diverses maneres (hom empra actualment més de dues-centes projeccions). En aquest pas, es produeixen inevitablement algunes de les següents alteracions: deformació de l’escala (l’escala no és la mateixa en tots els punts del mapa), deformació de l’àrea (àrees iguals en el globus no determinen àrees iguals en el mapa) i deformació de la forma (la zona projectada no té la mateixa forma que la zona originària). L’elecció d’un tipus concret de projecció és feta amb vista a minimitzar-ne alguna (com a mínim, sobre la zona del globus que interessi representar) per tal de satisfer els objectius concrets del mapa a realitzar. Així, per exemple, quan el mapa hagi de ser il·lustratiu convindrà que conservi la forma, però, en canvi, quan hagi de mostrar propietats estadístiques lligades a la distribució superficial, caldrà que conservi l’àrea. Hom pot classificar les projeccions d’acord amb diferents criteris. Un d’aquests té en compte què conserva (o què altera) la projecció. Així, una projecció és conforme (o ortomòrfica, o isogonal) quan conserva la forma (és a dir, quan una zona, no necessàriament de gran extensió, té la mateixa forma en el pla que en el globus); aquesta propietat és equivalent a la de conservació dels angles (si dues corbes fan un angle α sobre el globus, les corbes corresponents sobre el mapa fan el mateix angle α). Una projecció és equivalent quan conserva l’àrea (és a dir, quan la relació entre àrees corresponents és constant sobre tot el mapa). Finalment, una projecció és afilàctica quan no és ni conforme ni equivalent. Hom distingeix, a vegades, projeccions que tenen d’altres propietats de conservació: una projecció és geodèsica quan conserva les geodèsiques (és a dir, quan transforma les geodèsiques de l’esfera, que són els seus cercles màxims, en geodèsiques del pla, que són les seves línies rectes); és equidistant quan la relació entre una longitud mesurada sobre el globus i la corresponent longitud en el mapa és constant en totes les direccions. Un segon criteri emprat per a classificar les projeccions té en compte quina és la superfície sobre la qual és projectat el globus. Així, la projecció és zenital (o plana) si la superfície és un pla; és cònica si és un con; i és cilíndrica si és un cilindre. En el cas de les projeccions zenitals, hom pot distingir diferents casos segons el punt des del qual es fa la projecció; els casos més importants són la projecció ortogràfica, la projecció estereogràfica, la projecció gnomònica i la projecció escenogràfica. Cadascuna d’aquestes pot presentar-se en diferents orientacions, caracteritzada cadascuna d’elles pel punt del globus en què se situa el pla tangent sobre el qual es projecta: la projecció és polar si el pla és tangent en el pol, és equatorial si ho és en un punt de l’equador, i és obliqua (o inclinada) si ho és en un punt qualsevol situat entre les dues posicions anteriors. En el cas de les projeccions còniques (o derivades de les còniques) hom distingeix diferents casos, els més importants dels quals són: la projecció cònica simple, la projecció cònica secant, la projecció conforme de Lambert (o projecció de Lambert), la projecció cònica equivalent (amb dos casos destacables, la projecció equivalent de Lambert i la projecció d’Albers) i la projecció cònica múltiple (o policònica). Pel que fa a les projeccions cilíndriques (o derivades de les cilíndriques), hom distingeix diferents casos, els més importants dels quals són: la projecció de Mercator, la projecció transversal de Mercator (amb dos casos particulars: la projecció conforme de Gauss i la projecció UTM o projecció transversal de Mercator universal). Un cas extrem de les projeccions còniques, obtingut en degenerar el con fins a convertir-lo en un pla, és la projecció azimutal, una modificació de la qual és la projecció azimutal de Lambert. D’altres projeccions són classificables en dos grups. Les projeccions pseudocòniques són aquelles en què els paral·lels són circulars i concèntrics; ho són les projeccions cordiforme i de Bonne. Les projeccions pseudocilíndriques són aquelles en què els paral·lels són rectilinis i paral·lels; ho són la projecció homologràfica, la projecció sinusoidal, la projecció homolosina, la projecció Eckert IV, i la projecció polièdrica.
f
Cartografia
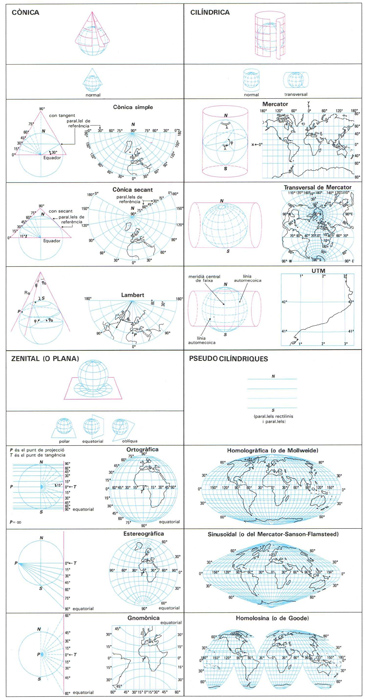
Diversos sistemes de projecció. projeccions còniques: cònica simple, cònica secant, Lambert; projeccions cilíndriques: Mercator, transversal de Mercator, UTM; projeccions zenitals (o planes): ortogràfica, estereogràfica, gnomòtica; projeccions preudo-cilíndriques: homologràfica (o de Mollweide), sinusoidal (o de Mercator-Sanson-Flamsteed), homolosiana (o de Goode)
© Fototeca.cat