Resultats de la cerca
Es mostren 6 resultats
cronometratge
Tecnologia
Fase d’un estudi de temps consistent a mesurar i enregistrar el temps invertit en una operació, element d’operació o inactivitat.
Durant el cronometratge el cronometrador observa un o més operaris o una o més màquines que fabriquen uns elements, per tal de determinar-ne el temps d’execució normal Per a calcular el temps normal de cronometratge d’un element hom ha de disposar d’una sèrie de valors que permeti d’obtenir una mitjana estable i representativa Convé que el nombre de vegades que hom cronometra els elements sigui com més petit millor però, com que l’exactitud dels temps normals obtinguts augmenta amb el nombre de valors, cal determinar en cada cas el nombre mínim de vegades que hom ha de…
salt
Electrònica i informàtica
Tecnologia
Qualsevol alteració en l’execució seqüencial de les instruccions o sentències d’un programa.
robot poliarticulat
Tecnologia
Robot manipulador que pot posicionar i orientar materials, peces, eines o dispositius especials per a l’execució de tasques diverses en les diferents etapes de la producció industrial.
robot industrial
Tecnologia
Robot manipulador que pot posicionar i orientar materials, peces, eines o dispositius especials per a l’execució de tasques diverses en les diferents etapes de la producció industrial.
Els robots industrials clàssics tenen tres graus de mobilitat i, en funció de l’espai de treball que generen, es classifiquen en robots cartesians , quan aquest espai té forma cúbica, robots cilíndrics , quan generen un espai cilíndric, robots polars , si el generen en forma de cúpula, i robots de braç articulat quan el seu espai de treball no té una forma definida Els robots industrials considerats no clàssics tenen més de tres graus de llibertat Cal destacar el robot industrial antropomòrfic , capaç de generar un espai de treball gairebé esfèric, i el robot SCARA , amb un moviment similar…
robot
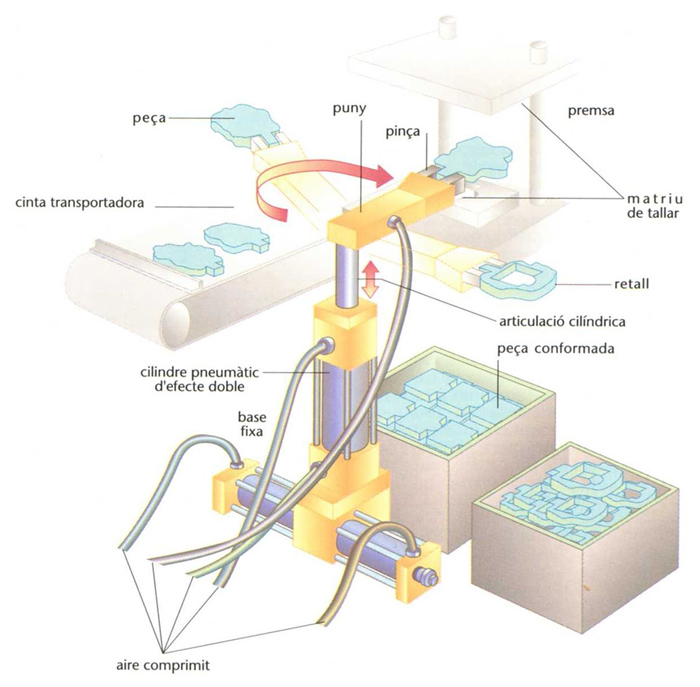
Robot de manipulació, d’un sol eix amb dos graus de mobilitat i accionament pneumàtic, equipat amb un terminal de pinça
© Fototeca.cat
Tecnologia
Electrònica i informàtica
Màquina automàtica capaç de manipular objectes, executar operacions i moviments diversos segons un programa que pot ésser modificable o adaptable, i que pot anar equipat amb sensors per tal de detectar els senyals d’entrada i les condicions ambientals.
Segons el seu comandament els robots poden ésser dirigits a distància quan reprodueixen moviments o ordres d’un generador remot, regulables quan executen moviments concrets mitjançant comandes manuals, programables si llurs moviments són guiats per un programa i intelligents si, a més, tenen capacitat per a modificar llur comportament d’acord amb l’observació de l’entorn per mitjà de sensors El mot “robot” del txec robota , ‘treball forçat’ fou creat per l’autor dramàtic Karel Čapek-Chod el 1920 en una de les seves peces de teatre, RUR Rossum's Universal Robots, per denominar un androide…
biga
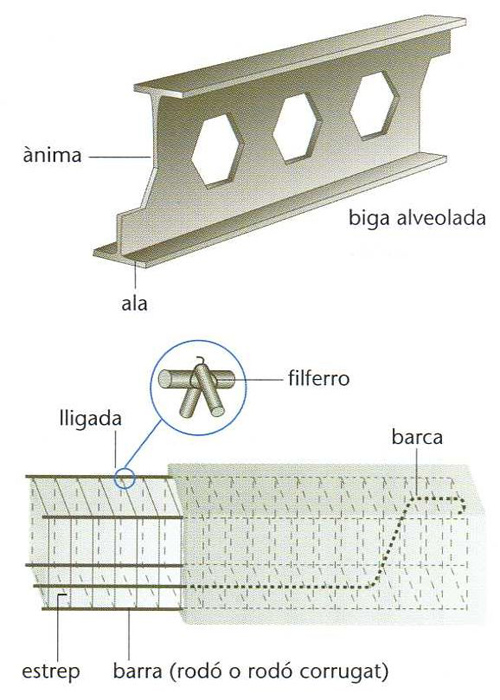
Esquema d’una biga de ferro (a sobre) i d’una de formigó armat (a sota)
© Fototeca.cat
Construcció i obres públiques
Tecnologia
Peça, generalment prismàtica, molt més llarga que ampla i disposada horitzontalment, que serveix per a suportar les càrregues que no graviten directament sobre una paret o un pilar.
El material emprat tradicionalment en la construcció de bigues és la fusta, que normalment admet esforços de tracció i de compressió màxims de 80 kg/cm 2 i, en aquest cas, les bigues, que consisteixen en general en troncs escorçats i escairats, són anomenades cabirons fins a uns 10 x 10 cm de secció i cairats més de 25 x 25 cm Hom empra bàsicament fusta de pi blanc i de melis per a bigues llargues generalment de menys de cinc metres, i la del roure per a bigues curtes i resistents Al segle XIX la fusta fou substituïda pel ferro en ésser possible de fabricar-ne peces de dimensions suficients i…