Resultats de la cerca
Es mostren 2 resultats
robot
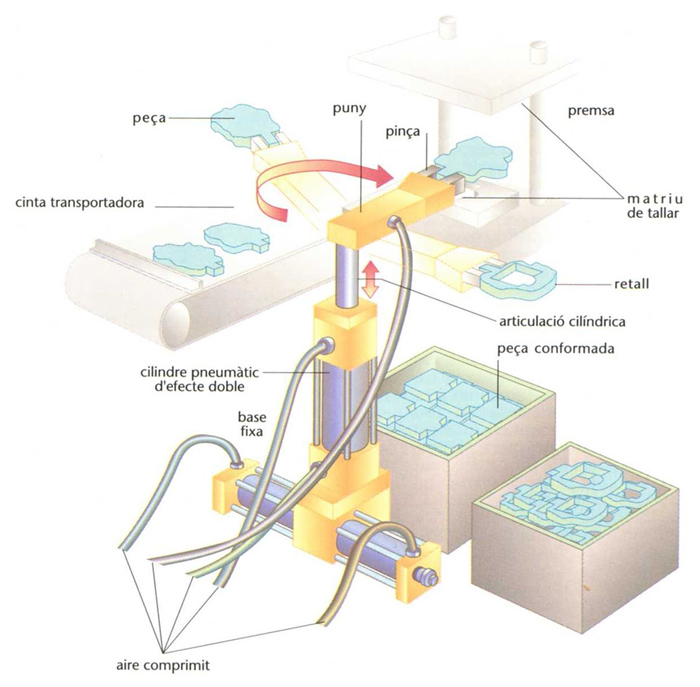
Robot de manipulació, d’un sol eix amb dos graus de mobilitat i accionament pneumàtic, equipat amb un terminal de pinça
© Fototeca.cat
Tecnologia
Electrònica i informàtica
Màquina automàtica capaç de manipular objectes, executar operacions i moviments diversos segons un programa que pot ésser modificable o adaptable, i que pot anar equipat amb sensors per tal de detectar els senyals d’entrada i les condicions ambientals.
Segons el seu comandament els robots poden ésser dirigits a distància quan reprodueixen moviments o ordres d’un generador remot, regulables quan executen moviments concrets mitjançant comandes manuals, programables si llurs moviments són guiats per un programa i intelligents si, a més, tenen capacitat per a modificar llur comportament d’acord amb l’observació de l’entorn per mitjà de sensors El mot “robot” del txec robota , ‘treball forçat’ fou creat per l’autor dramàtic Karel Čapek-Chod el 1920 en una de les seves peces de teatre, RUR Rossum's Universal Robots, per denominar un androide…
protocol d’encaminament dinàmic
Electrònica i informàtica
En el context de xarxes IP, terme genèric per a denominar protocols dissenyats perquè els encaminadors de xarxa s’intercanviïn informació que els permeti descobrir automàticament les xarxes que interconnecten i rutes òptimes (de minim cost) per a arribar-hi.
A banda de definir com es produeix aquest intercanvi, els protocols d’encaminament empren algun algorisme d’encaminament per triar, de totes les rutes possibles, les que tenen un cost menor La unitat amb què s’expressa el cost d’una ruta o d’un enllaç és específica de cada protocol Hi ha protocols estàndard i d’altres de propietaris, definits pels fabricants dels encaminadors En el context d’internet, se solen classificar els protocols en protocols interiors Interior Routing Protocols o IGPs o protocols exteriors External Routing Protocols o EGPs Exemples d’IGPs estàndard són el RIP, l’OSPF…