Resultats de la cerca
Es mostren 3 resultats
electrodinàmica quàntica QED [electrodinàmica quàntica]
Electrònica i informàtica
Teoria quanticorelativista de la interacció matèria-radiació.
La clau del model està en la idea que la interacció electromagnètica és transmesa gràcies a l’intercanvi de fotons, els quals són descrits mitjançant camps Les prediccions teòriques de l’electrodinàmica són les més precises de la física En un experiment realitzat el 2010 que mesurà el radi del protó en àtoms d’hidrogen en què els electrons havien estat substituïts per muons negatius, s’obtingué un valor significativament més baix per aquest que el que s’acceptava fins aleshores, de manera que hom s’està replantejant la precisió de l’electrodinàmica quàntica, o com a mínim la…
senyal
Tecnologia
Electrònica i informàtica
Model matemàtic de les variables d’un sistema.
Generalment, admet una descripció temporal , variacions del senyal en el temps, i una descripció freqüencial espectre , components del senyal de diversa freqüència Un senyal determinista és el que té una descripció com a funció de la variable temps x t, mentre que els senyals aleatoris solament poden ésser descrits per un model probabilístic soroll en un sistema de transmissió Els senyals analògics són definits per a tot valor de t , en contraposició als discrets en el temps o seqüències que solament ho són per a t=nT , on n és un nombre natural i T un valor determinat de t Un senyal …
robot
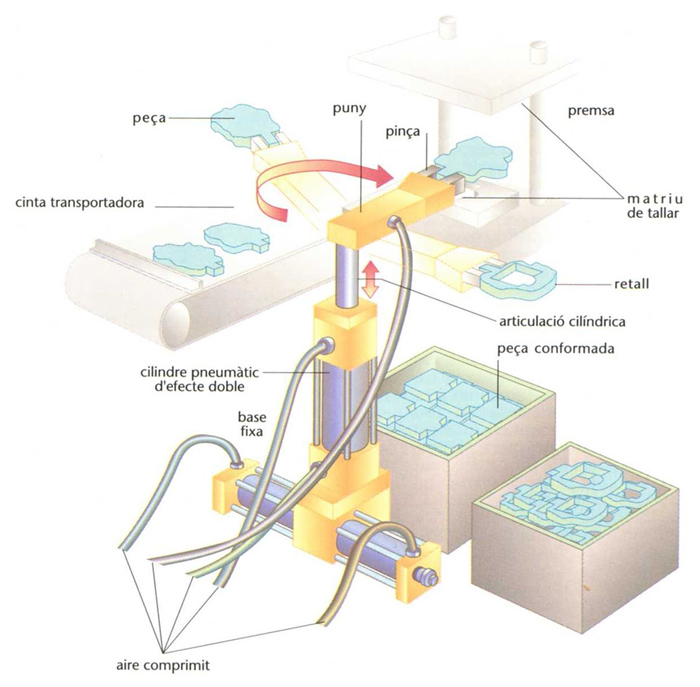
Robot de manipulació, d’un sol eix amb dos graus de mobilitat i accionament pneumàtic, equipat amb un terminal de pinça
© Fototeca.cat
Tecnologia
Electrònica i informàtica
Màquina automàtica capaç de manipular objectes, executar operacions i moviments diversos segons un programa que pot ésser modificable o adaptable, i que pot anar equipat amb sensors per tal de detectar els senyals d’entrada i les condicions ambientals.
Segons el seu comandament els robots poden ésser dirigits a distància quan reprodueixen moviments o ordres d’un generador remot, regulables quan executen moviments concrets mitjançant comandes manuals, programables si llurs moviments són guiats per un programa i intelligents si, a més, tenen capacitat per a modificar llur comportament d’acord amb l’observació de l’entorn per mitjà de sensors El mot “robot” del txec robota , ‘treball forçat’ fou creat per l’autor dramàtic Karel Čapek-Chod el 1920 en una de les seves peces de teatre, RUR Rossum's Universal Robots, per denominar un androide…