Resultats de la cerca
Es mostren 9 resultats
robot
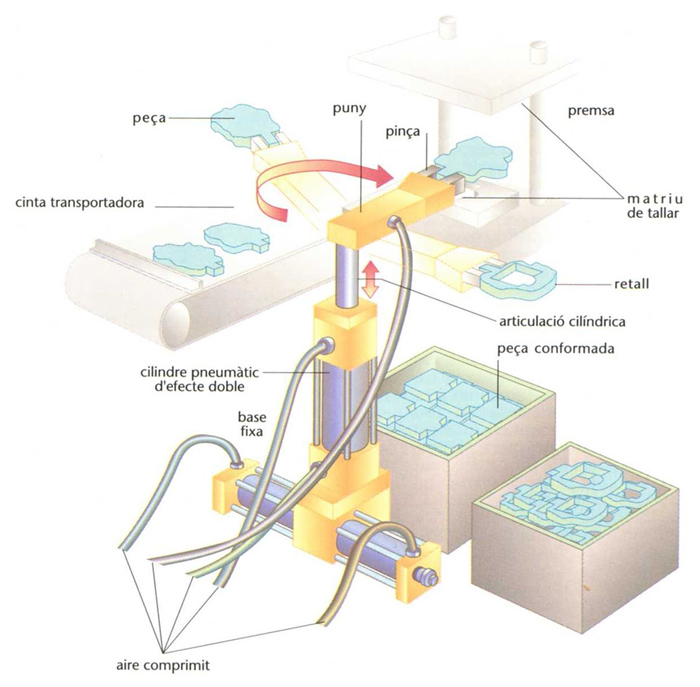
Robot de manipulació, d’un sol eix amb dos graus de mobilitat i accionament pneumàtic, equipat amb un terminal de pinça
© Fototeca.cat
Tecnologia
Electrònica i informàtica
Màquina automàtica capaç de manipular objectes, executar operacions i moviments diversos segons un programa que pot ésser modificable o adaptable, i que pot anar equipat amb sensors per tal de detectar els senyals d’entrada i les condicions ambientals.
Segons el seu comandament els robots poden ésser dirigits a distància quan reprodueixen moviments o ordres d’un generador remot, regulables quan executen moviments concrets mitjançant comandes manuals, programables si llurs moviments són guiats per un programa i intelligents si, a més, tenen capacitat per a modificar llur comportament d’acord amb l’observació de l’entorn per mitjà de sensors El mot “robot” del txec robota , ‘treball forçat’ fou creat per l’autor dramàtic Karel Čapek-Chod el 1920 en una de les seves peces de teatre, RUR Rossum's Universal Robots, per denominar un…
aranya
Electrònica i informàtica
Programa informàtic que busca pàgines web, les indexa i les emmagatzema en el directori d’un cercador.
segmentació d’imatges
Electrònica i informàtica
Tècnica de tractament de la imatge que consisteix a separar una imatge en diverses zones o bé en objectes.
En robòtica, es fa servir en equips de visió artificial perquè el robot sigui capaç d’extreure'n els paràmetres necessaris per a la navegació
programació automàtica
Electrònica i informàtica
Tipus de programació de robots que es basa en la confecció prèvia d’un model de l’entorn.
Un cop definit el model de l’entorn, només cal descriure al robot la tasca que ha de realitzar i automàticament aquest és capaç de dur-la a terme
telemedicina

telemedicina
© Ohio Supercomputer Center
Electrònica i informàtica
Aplicació de les tecnologies de la informació i la comunicació a les necessitats de la sanitat.
Inclou tècniques com ara la telecirurgia operacions a distància en què el cirurgià controla remotament un robot que executa l’operació, la teleassistència en què el metge, al seu despatx, es comunica amb el pacient que és a casa seva, o la monitorització remota de pacients en què els sensors que monitoritzen l’estat del pacient recopilen i transmeten automàticament les seves dades a un ordinador, que pot analitzar-les i detectar situacions d’alarma, entre d’altres
xarxa‘feed-forward’
Electrònica i informàtica
Tipus de xarxa neuronal en què les neurones artificials s’organitzen en capes i només hi ha connexions entre neurones de capes successives.
La primera d’aquestes capes, o capa d’entrada, té tantes neurones com senyals és capaç de rebre el robot, mentre que la capa de sortida té les que equivalen al nombre de valors de sortida que s’esperin Entremig d’aquestes dues capes, hi ha un nombre variable de capes intermèdies, denominades capes ocultes, que són les que prenen les decisions Per la forma de les connexions entre les capes, sovint se l’anomena xarxa neuronal de connexió cap endavant
George Devol
Electrònica i informàtica
Enginyer i inventor nord-americà.
Després de treballar uns quants anys a la Cinephone United Corporation, companyia dedicada a la fabricació d’amplificadors de so, el 1940 fundà una petita empresa de contramesures per a radar, la General Electronics, que aviat esdevingué la més important dels Estats Units El 1954, després de molts anys d’investigació, patentà el primer manipulador programable, autèntic embrió del robot industrial, i encunyà el terme automatització El 1956, amb JF Engelberger, fundà la Consolidated Controls Corporation, la primera companyia dedicada a la fabricació de robots, que més tard s’…
percepció de l’entorn
Electrònica i informàtica
Capacitat d’un robot per a captar informació del seu entorn per mitjà dels sensors i d’interpretar-la per tal d’utilitzar-la en funcions de control.