Resultats de la cerca
Es mostren 3 resultats
oxitall

oxitallament de planxes d’acer amb una màquina automàtica de quatre capçals
© Fototeca.cat
Tecnologia
Procediment de tallament de planxes metàl·liques mitjançant una oxidació local a alta temperatura.
Generalment hom el realitza amb un bufador oxiacetilènic especial, proveït d’un bec per on hom fa sortir oxigen a alta pressió un cop la zona a tallar ha estat convenientment escalfada per la flama oxiacetilènica Pot realitzar-se manualment, resseguint amb el bec del bufador el traçat prèviament realitzat sobre la planxa, o bé automàticament oxitallament a màquina, procediment en el qual el bufador o bufadors va muntat sobre un capçal que es desplaça sobre la superfície de la planxa seguint les ordres de comandament que rep d’un sistema copiador resseguint mecànicament o…
imatgeria
Tecnologia
Conjunt de les tècniques que tenen per finalitat d’obtenir una imatge, sia una imatge formada a conseqüència d’algun tipus d’interacció entre l’objecte i un senyal (lluminós, electromagnètic, sonor, etc) o bé una imatge generada directament per un procés informàtic.
En el primer cas, hom parla d' imatgeria òptica si l’objecte emet o reflecteix un senyal electromagnètic pertanyent a l’espectre visible llum visible i, per tant, hom pot incloure en aquesta classificació la representació òptica formació d’imatges mitjançant sistemes òptics, la fotografia, la cinematografia i la televisió, l’holografia, etc d’altra banda, hom parla d' imatgeria no òptica si l’objecte emet o reflecteix un senyal no òptic susceptible d’admetre algun tipus de tractament d’imatge, com és el cas de la termografia formació d’imatges infraroges, la radiografia raigs X, la…
robot
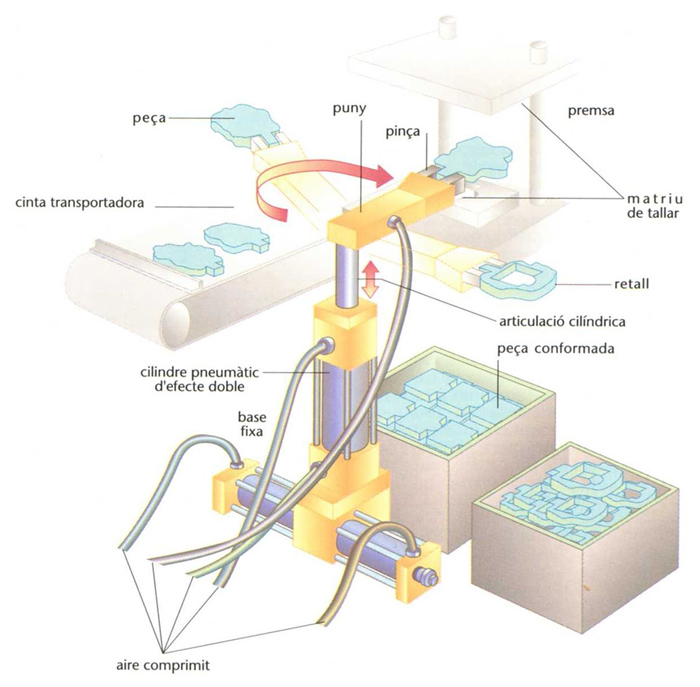
Robot de manipulació, d’un sol eix amb dos graus de mobilitat i accionament pneumàtic, equipat amb un terminal de pinça
© Fototeca.cat
Tecnologia
Electrònica i informàtica
Màquina automàtica capaç de manipular objectes, executar operacions i moviments diversos segons un programa que pot ésser modificable o adaptable, i que pot anar equipat amb sensors per tal de detectar els senyals d’entrada i les condicions ambientals.
Segons el seu comandament els robots poden ésser dirigits a distància quan reprodueixen moviments o ordres d’un generador remot, regulables quan executen moviments concrets mitjançant comandes manuals, programables si llurs moviments són guiats per un programa i intelligents si, a més, tenen capacitat per a modificar llur comportament d’acord amb l’observació de l’entorn per mitjà de sensors El mot “robot” del txec robota , ‘treball forçat’ fou creat per l’autor dramàtic Karel Čapek-Chod el 1920 en una de les seves peces de teatre, RUR Rossum's Universal Robots, per denominar un …