Resultats de la cerca
Es mostren 7 resultats
polivalència
Tecnologia
Capacitat que té un robot per a adaptar-se a tasques diferents.
robot reconfigurable
Tecnologia
Robot del qual es pot canviar algun component a fi que pugui realitzar tasques diferents aprofitant el mateix sistema de control.
robot
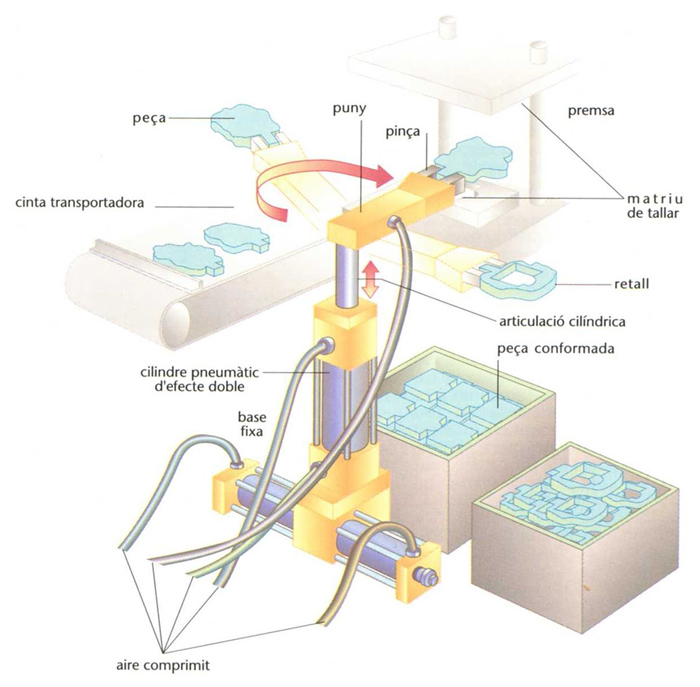
Robot de manipulació, d’un sol eix amb dos graus de mobilitat i accionament pneumàtic, equipat amb un terminal de pinça
© Fototeca.cat
Tecnologia
Electrònica i informàtica
Màquina automàtica capaç de manipular objectes, executar operacions i moviments diversos segons un programa que pot ésser modificable o adaptable, i que pot anar equipat amb sensors per tal de detectar els senyals d’entrada i les condicions ambientals.
Segons el seu comandament els robots poden ésser dirigits a distància quan reprodueixen moviments o ordres d’un generador remot, regulables quan executen moviments concrets mitjançant comandes manuals, programables si llurs moviments són guiats per un programa i intelligents si, a més, tenen capacitat per a modificar llur comportament d’acord amb l’observació de l’entorn per mitjà de sensors El mot “robot” del txec robota , ‘treball forçat’ fou creat per l’autor dramàtic Karel Čapek-Chod el 1920 en una de les seves peces de teatre, RUR Rossum's Universal Robots, per denominar un androide…
robot poliarticulat
Tecnologia
Robot manipulador que pot posicionar i orientar materials, peces, eines o dispositius especials per a l’execució de tasques diverses en les diferents etapes de la producció industrial.
robot industrial
Tecnologia
Robot manipulador que pot posicionar i orientar materials, peces, eines o dispositius especials per a l’execució de tasques diverses en les diferents etapes de la producció industrial.
Els robots industrials clàssics tenen tres graus de mobilitat i, en funció de l’espai de treball que generen, es classifiquen en robots cartesians , quan aquest espai té forma cúbica, robots cilíndrics , quan generen un espai cilíndric, robots polars , si el generen en forma de cúpula, i robots de braç articulat quan el seu espai de treball no té una forma definida Els robots industrials considerats no clàssics tenen més de tres graus de llibertat Cal destacar el robot industrial antropomòrfic , capaç de generar un espai de treball gairebé esfèric, i el robot SCARA , amb un moviment similar…
control digital
Tecnologia
Electrònica i informàtica
Control en temps real de sistemes dinàmics en el qual el controlador
o corrector és instrumentat per mitjà d’un ordinador.
El seu ús és més estès en servomecanismes, pilots automàtics, refineries i sistemes de transport públic això és a causa, d’una banda, de llur velocitat i precisió intrínseques i, de l’altra, de la millora en la fiabilitat i el preu dels ordinadors L’adveniment dels microprocessadors ha donat una empenta definitiva a l’ús del control digital que hom pot trobar avui en els automòbils, els aparells electrodomèstics i els jocs electrònics Els trets característics d’aquest tipus de control són la versatilitat poden executar tasques variades, a més de les de control la flexibilitat poden canviar…
informàtica
Electrònica i informàtica
Tecnologia
Conjunt de ciències, tècniques o activitats relacionades amb el tractament automatitzat de dades.
Aquests sistemes consten d’uns components físics, anomenats maquinari o hardware , i d’uns components lògics o formals, anomenats programari o software Els components físics són constituïts per l' ordinador , element que efectua pròpiament el tractament de les dades o sigui, les operacions aritmètiques i lògiques, i l’equip perifèric , conjunt de màquines que proporcionen a l’ordinador l’entrada, l’emmagatzematge i la sortida La informàtica dissenya els elements constituents de l’estructura lògica o arquitectura de l’ordinador i de l’equip perifèric Els components lògics d’un sistema de…